毕 业 设 计 [论 文]
题目:RTK与全站仪联合定界的

应用

 系 别: 测绘与城市空间信息系
系 别: 测绘与城市空间信息系
专 业: 工程测量技术
姓 名: ***
学 号:
指导教师:
XX大学
20##年 5 月 15 日
XX大学
毕业设计(论文)
任 务 书

XX大学本科毕业设计(论文)任务书
注:任务书必须由指导教师和学生互相交流后,由指导老师下达并交教研室主任审核后发给学生,最后同学生毕业论文等其它材料一起存档。
毕业设计(论文)成绩评定
答辩小组评定意见
一、评语(根据学生答辩情况及其论文质量综合评定)。

二、评分(按下表要求评定)
答辩小组成员签字
年 月 日

毕业答辩说明
1、答辩前,答辩小组成员应详细审阅每个答辩学生的毕业设计(论文),为答辩做好准备,并根据毕业设计(论文)质量标准给出实际得分。
2、严肃认真组织答辩,公平、公正地给出答辩成绩。
3、指导教师应参加所指导学生的答辩,但在评定其成绩时宜回避。
4、答辩中要有专人作好答辩记录。

指导教师评定意见
一、对毕业设计(论文)的学术评语(应具体、准确、实事求是):
签字:
年 月 日

二、对毕业设计(论文)评分[按下表要求综合评定]。
(1)理工科评分表
(2)文科评分表
指导教师签字: 年 月 日
摘 要
文章中系统的阐述了GPS的发展史;实时动态(RTK)测量系统。RTK测量技术是以载波相位观测量为根据的实时差分GPS 测量技术。包括网络RTK测量技术的含义、系统的组成以及其在测量领域内的应用,分析了连续运行参考站系统技术构成、数据通讯方式等,比较了网络RTK技术和全站仪的工作原理和基本流程,展望了基于动态网络移动参考站的网络RTK技术在勘测这方面的应用前景。
关键词:RTK;GPS;勘测定界。
Abstract
The article systematically discusses the history of the development of real-time dynamic GPS; (RTK) measuring system.RTK measurement technology is based on the carrier phase measurements according to the real time difference GPS measurement technology.Including network RTK measurement technology meaning, system composition and the measurement in the field of application, analysis of the continuously operating reference station system technology, data communication method, compares the network technology of RTK and total station instrument's working principle and Prospect of basic flow, based on dynamic network moving reference station network RTK technology in surveying this application prospect.
Key words: RTK; GPS; investigation delimitation.
目 录
目 录... 1
序 言... 1
1. GPS概述... 2
1.1 GPS的历史... 2
1.2 GPS在生活中应用... 3
2.RTK构成... 4
2.1 RTK简介... 4
2.2 RTK系统组成... 5
2.2.1 基准站功能.. 5
2.2.2 用户应用系统... 5
2.3 RTK的基本原理... 6
3.RTK四参数转换... 7
3.1 GPS—RTK平面坐标转换方法... 7
3.2 GPS—RTK高程转换... 8
4.RTK实际操作... 10
4.1 架设基准站及流动站的简易流程... 10
4.2 转换参数... 11
5. 介绍工程... 13
5.1 仪器对比... 14
5.1.1 全站仪综述... 14
5.1.2 RTK优势... 15
总 结... 17
参考文献... 18
致 谢... 19
序 言
随着GPS (RTK)方面技术成熟,它们在工程方面的应用日益广泛。而在经济高速发展的今天;城市不断的再扩大、产业园区随之增长;征收土地面临着勘测定界的重任;工作复杂繁琐,勘测定界工程作为工程测量的一部分,RTK技术的引进和应用,将会给该行业带来一次飞跃。
为了进一步验证RTK技术在工程测量中的精度和可靠度,联系结合实际在广安市前锋镇项目的实施情况,通过对比总结作业结果,总结出了动态RTK使用方便快捷的测量措施,以利于在确保工程精度的前提下,减轻劳动强度并提高工作效率。
1. GPS概述
1.1 GPS的历史
GPS 是英文Global Positioning System(全球定位系统)的简称,而其中文简称为“球位系”。GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统 。其主要目的是为陆、海、空三大领域提供实时、 全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。
GPS的空间部分是由24颗卫星组成(21颗工作卫星;3颗备用卫星),它位于距地表20200km的上空,均匀分布在6 个轨道面上(每个轨道面4 颗),轨道倾角为55°。卫星的分布使得在全球任何地方、任何时间都可以同时观测到4 颗以上的卫星。在GPS观测中,我们测出卫星到接收机的距离,利用三维坐标中的距离公式,利用3颗卫星,就可以组成3个方程式,解出观测点的位置(X, Y, Z )三个未知数。考虑到卫星时钟与接收机时钟之间的误差,实际上有4个未知数,X, Y, Z和钟差,因此,需要引入第4颗卫星,形成4个方程式进行求解,从而可以确定某一观测点的空间位置,精确算出该点的经纬度和高程。
实际上,接收机经常可以锁住4颗以上的卫星,此时接收机可按卫星的分布分成若干组,每组4颗,然后通过算法挑选出误差最小的一组用作定位,以提高定位精度。由于卫星运行轨道、卫星时钟存在误差,大气对流层、电离层对信号的影响,以及人为的SA保护政策,使得民用GPS的定位精度只有100米。为提高定位精度,普遍采用差分GPS (DGPS)技术,建立基准站(差分台)进行GPS观侧,利用已知的基准站精确坐标,与GPS接收机的观测值进行比较,从而得出一个改正数,并对外发布。接收机收到改正数后,与自身的观测值进行比较,加以改正计算,可以消去大部分误差,得到一个比较准确的位置数值。
1.2 GPS在生活中应用
实验还表明,利用差分GPS,定位精度可提高到5米。由于GPS技术所具有的全天候、高精度和自动测量的特点,是迄今最好的导航定位系统。随着全球定位系统的不断改进,硬、软件的不断完善,应用领域正在不断地开拓,目前已遍及国民经济各种部门,作为先进的测量手段,己经融入了国民经济建设、国防建设和社会发展的各个应用领域、并开始逐步深入人们的日常生活。
随着冷战结束和全球经济的蓬勃发展,美国政府宣布于20##年5月1日宣布在,在保证美国国家安全不受威胁的前提下,取消SA政策,GPS民用信号精度在全球范围内得到改善,利用C/A码进行单点定位的精度由100米提高到10米,这将进一步推动GPS技术的应用,提高生产力、作业效率、科学水平以及人们的生活质量,刺激GPS市场的增长。由此可见,GPS技术市场的应用前景非常可观。
2.RTK构成
2.1 RTK简介
RTK(Real time kinematic)实时动态测量系统。它是集计算机技术、数字通讯技术、无线电技术和GPS测量定位技术为一体的组合系统;它是GPS测量技术发展中的一个新突破。RTK定位精度高,可以全天侯作业,每个点的误差均为不累积的随机偶然误差。RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测绘、勘测边界,各种控制测量带来了新曙光,极大地提高了外业作业效率。
高精度的GPS测量必须采用载波相位观测值,RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时的提供测站点在指定坐标系中的三维空间定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链差分将其观测值和测站平面坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不足一秒钟。流动站可处于静止状态,也可处于运动状态;可在固定点上先进行初始化后再进入动态作业,也可在动态条件下直接开机,并在动态环境下完成整周模糊度的搜索求解。在整周未知数解固定后,即可进行每个但元的实时处理,只要能保持4颗以上卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果。
RTK技术的关键在于数据处理技术和数据传输技术,RTK定位时要求基准站接收机实时地把观测数据(伪距观测值,相位观测值)及已知数据传输给流动站接收机,数据量比较大,一般都要求9600的波特率,这在无线电台上不难实现。而随着科学技术的不断发展,RTK技术已由传统的1+1或1+2发展到了广域差分系统WADGPS,有些城市建立起CORS系统,由此大大提高了RTK的测量作业范围,当然在数据传输方面也有了长足的进展,由原先的电台传输发展到现在的GPRS和GSM网络传输,大大提高了数据的传输效率和范围;而在网络RTK的使用当中数据传输无距离限制。
RTK为实时动态测量技术,利用卫星发射的两个载波L1(1575.42MHZ)和L2(1227.60MHZ),以载波相位测量为根据的实时差分测量技术。一般情况下,有一个基准站和一个以上的流动站。基准站可设在已知点也可在未知点上,利用求测的WGS--84坐标和已知的地方坐标可求出坐标转换的参数,在求得转换参数后,利用基准站时时测得站点坐标信息于流动站测得的时时坐标信息,两站之间的基线向量来求出流动站的时时坐标。在后续测量中,求未知点时可直接得到地方坐标系中的坐标。在不同的RTK品牌设备中求解的要求略有不同。
2.2 RTK系统组成
GPS连续运行卫星定位服务综合系统由基准站网、数据处理中心、数据传输系统、定位导航数据播发系统、用户应用系统五个部分组成;各基准站与数据处理中心间通过数据传输一同连接成一体,形成专用网络。
2.2.1 基准站功能.
基准站网负责采集GPS卫星观测数据并输送至数据处理中心,同事提供系统完好性监测服务。基准站是系统的数据源,用于实时对卫星信号进行捕获、跟踪、记录和传输。
数据处理中心是连续运行卫星定位服务综合系统的核心单元;也是高精度实时动态定位得以实现的关键;数据播发系统通过移动网络、UHF电台等形式向用户播发定位导航数据。
2.2.2 用户应用系统
用户信息接收系统、网络型RTK定位系统、事后和快速精密定位系统;流动站是系统的用户部分,通过获取的网络差分改正数据;流动站主要有GPS接收机和移动通讯设备组成(图1)。

图1 GPS接收机和移动通讯设备组成
2.3 RTK的基本原理
RTK测量技术,是以载波相位观测量为根据的实时差分GPS测量技术。实时动态测量的基本原理是在基准站上安置一台GPS接收机,对所有可见GPS卫星进行连续的观测,并将其观测数据通过无线电传输设备,实时地发送给用户观测站。在用户站上,GPS接收机在接收GPS卫星信号的同时,通过无线电传输设备,接收基准站传输的观测数据,然后根据相对定位的原理,实时地计算并显示用户站的三维坐标,其精度可达到厘米级。
目前国际上主流的网络RTK技术;系统通过GPS基准站网络建立各种误差模型,然后根据流动站的具体位置虚拟出流动站附近一“虚拟”基准站的改正数据;通过无线通讯链路(GSM/GPRS或CDMA)将改正数据播发给流动站用户,流动站用户在此基础上进行RTK作业。网络中的各固定基准站通过双频GPS接收机获取卫星载波相位、伪距等观测量,并通过实时地将原始数据上传到控制中心。控制中心按照流动站使用的无线通讯将虚拟参考值的数据原路发回(RTCM或CMR+)。流动站可按照常规RTK的原理进行超短基线的常规RTK模式作业。并获得厘米级的测量精度。
3.RTK四参数转换
3.1 GPS—RTK平面坐标转换方法
GPS RTK一般都是采用平面坐标转换模型求解。用WGS-84坐标系转换成国家的80坐标系或者地方坐标系。
根据RTK原理,基准站和流动站直接采集的都为WGS84坐标,参考站以1 个WGS284 坐标作为起始值实时计算点位误差并由网络电台发射出去,流动站同步接收WGS84 坐标并通过电台接收来自基准站的数据,达到卫星颗数的满足后即可得到固定解,流动站就可得到相对于基准站成果的高精度WGS84 坐标。而实际工作中往往采用地方坐标系,由此便有两坐标系统之间椭球转换,即转换参数的求取。HD-V8GNSS(1 + 2) RTK提供平面四参数转换、七参数转换、一步法、Trimble、格网拟合等实用方法。
在一个工程测区范围内控制做完后;在测区内有两个以上的控制点时;且已经知道地方坐标系投影带。就可以用手薄软件坐标转换模块里面的四参数方法计算(图2);使用两个控制点的平面坐标系之间的平移、旋转、缩放比例参数。即可把WGS84坐标系转换成工程测区要使用的坐标系。

图2 平面四参数转换
3.2 GPS—RTK高程转换
由于载波波长比伪距码长小了2个数量级,同时,在载波相位差分测量数据处理中,充分利用了不同卫星、测站和历元间的线形组合(单差、双差和三差),消除和削弱了某些不能进行较好模型化处理的误差,因而经处理后的点位精度远高于伪距差分。
由GPS相对定位的基线向量,可以得到高精度的大地高差。如果在GPS网中已知一个点的大地高,就可以在GPS网平差后求得全网各点的大地高。大地高是以参考椭球面为基准面的,地面点大地高的定义是:由地面点沿通过该点的椭球面法线到椭球面的距离。但是,我国通用的是正常高系统,是以似大地水准面为基准面的,参考椭球面与似大地水准面是两个不同的基准面,二者既不重合也布平行,大地高与正常高之间的差值称为高程异常。因此,在GPS测量中,在得到GPS点的大地高之后,要得到实际工作需要的正常高,还需要求解高程异常。在GPS网中,已知一个点 的大地高
的大地高 ,对该网进行网平差后,可知各点的大地高
,对该网进行网平差后,可知各点的大地高 。又已知点的正常高
。又已知点的正常高 ,并且由水准联系测得到另外一些GPS点的与点的正常高差
,并且由水准联系测得到另外一些GPS点的与点的正常高差 ,则可以求得各点的高程异常,用公式可表示为:
,则可以求得各点的高程异常,用公式可表示为:
 (3-2-1)
(3-2-1)
由上式还可知,对于GPS网中未联测水准的点,如果知道高程异常,就可以得到正常高。由单点定位得到的GPS点的大地高具有很高的精度,如果水准测量的精度也很高,则可以得到高精度的高程异常。在测量区域不大的范围内,近似大地水准面的变化比较平缓,可以利用联测水准的GPS点用曲面拟合法来逼近似大地水准面,以求得其它GPS点的高程异常,进而求得正常高。
曲面拟合法,就是将高程异常近似看作是一定范围内各点坐标的曲面函数,高程异常在此范围内变化平缓,可以利用已联测水准的GPS点的高程异常来拟合这一函数。在求得函数之后,就可以计算其它GPS点的高程异常和正常高。通常采用二次曲面函数对高程异常进行曲面拟合。
对于GPS水准联测点,拟合模型表示为:
 (3-2-2)
(3-2-2)
上式中:
 ,
, 为重心坐标,
为重心坐标,
 为点的平面坐标,
为点的平面坐标, 为拟合残差。由上式可知,采用二次曲面拟合时,至少应有6个GPS水准联测点,当少于6个联测点时,应该去掉二次项系数,变成平面函数拟合模型:
为拟合残差。由上式可知,采用二次曲面拟合时,至少应有6个GPS水准联测点,当少于6个联测点时,应该去掉二次项系数,变成平面函数拟合模型:
 (3-2-3)
(3-2-3)
平面拟合只限于小区域且较为平坦的范围。如果能提供10个或更多的水准联测点,则可采用三次曲面函数来拟合,效果会更好,三次曲面拟合模型如下:
 (3-2-4)
(3-2-4)
求出似大地水准面之后,GPS网中各点高程可以通过(3-2-1)式求得。
4.RTK实际操作
在作业工作前;首先将基准站GPS接收机安置在测区大致中间部分开阔的地方;架设在已知控制点或者未知点均都可以;本文中海达HDV8GNSS接收机为例;简述接收机的流程。
4.1 架设基准站及流动站的简易流程
基准站可架设在已知点或未知点上;必须满足一些要求:高度角在15度以上开阔;无大型建筑物,无电磁波干扰等。这样有助于卫星接收信号。1、 架设基准站、设置好GPS主机网络工作模式;打开手簿软件、新建项目、设置坐标系统参数、连接基准站、设置好基准站参数,使基准站发射差分信号;再将其与基准站断开连接,再选择连接GPS;连接移动站;设置移动站和基准站模式相同,使得移动站接收到基准站的差分数据,并达到窄带固定解。
移动站要到测区已知控制点上测量出窄带固定解状态下的已知点原始坐标。
点击主界面上的【测量】按钮,如下图(图3)


 表示单点定位 Int表示 RTK固定解
表示单点定位 Int表示 RTK固定解
图 3 进入碎部测量界面
查看屏幕上方的解状态,在GPS达到“Int” RTK固定解后,在需要采集点的控制点上,对中、整平GPS天线,点击右下角的 或手簿键盘“F2”键 保存坐标可以。
或手簿键盘“F2”键 保存坐标可以。
弹出“设置记录点属性”对话框(如下图4),输入“点名”和“天线高”,下一点采集时,点名序号会自动累加,而天线高与上一点保持相同,确认,此点坐标将存入记录点坐标库中。在至少两个已知控制点上保存两个已知点的源坐标到记录点库。
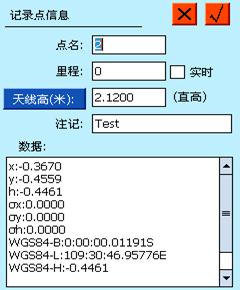
图 4 输入“点名”和“天线高”,
4.2 转换参数
采集完控制点后;软件回到主界面,点击【参数】→“左上角下拉菜单”→【坐标系统】→【参数计算】,进入“求解参数”视图:(如图5)。
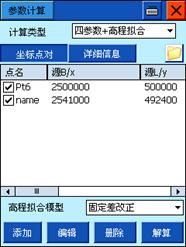
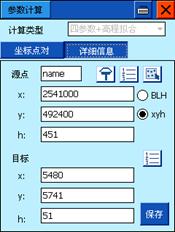
图 5 求解参数 图6 求解参数
点击【添加】按钮,弹出图6对话框,要求分别输入源点坐标和目标点坐标,点击 从坐标点库提取点的坐标,从记录点库中选择控制点的源点坐标,在目标坐标中输入相应点的当地坐标。点击【保存】,重复添加,直至将参与解算的控制点添加完,点击对话框右下角【解算】按钮,弹出(如图7)求解好的四参数,点击【运用】。
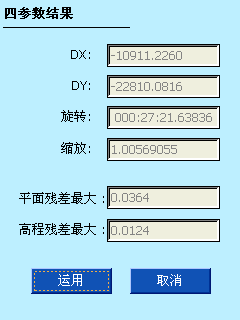
图 7 求解好的四参数
四参数中的缩放比例为一非常接近1的数字,越接近1越可靠,一般为0.999x或1.000x平面中误差,高程中误差表示点的平面和高程残差值,如果超过要求的精度限定值,说明测量点的原始坐标或当地坐标不准确,残差大的控制点,不选中点前方的小勾,不让其参与解算,这对测量结果的精度有决定性的影响!点击运用后会弹出的参数界面中,检查看看“平面转换”和“高程拟合”是否应用,确认无误后,点击右上角【保存】,再点击右上角【√】或者【是】,回退到软件程序的主界面。点击那个测量图标就进入碎步采集模式了;仪器设置到这一步已经结束;可以开始工作了。
5. 介绍工程
我所在实习单位承担了河南省义马市千秋矿区的地形测量任务,总面积约为6㎞2,地形成图比例尺1:500;义马市位于河南省西部,隶属三门峡市,东距省会郑州183公里,西距三门峡市区65公里,市域地处东经111°50′47″至111°50′49″,北纬34 °42′至46′。东、南、西、北四面均与渑池县相环接,唯东南一隅与宜阳县、新安县为邻。
地形随着山脉河流走向,为北高南低,西高东低,地势自北向南倾斜,属秦岭余脉崤山延伸地带。市区南北有东西走向的两条山脉,北部为韶山支脉的雁眉山、南屏山,穿市区北部边境而过,最高处海拔739米,向南呈缓坡形降低,浅山丘陵区岩层外露,多为荒山,坡地耕种区土地比较瘠薄。由于长期采矿原因,地面多有塌陷,呈明显的人工地貌特征。。
此次施测采用1980西安坐标系,1985国家高程基准。综合分析整个测区地势属于山地浅丘地貌,地形条件复杂,测区内还牵扯到山体、陡崖区域,测区内人口密度较大,交通相对便利。整个测区以旱地及经济作物、房屋、河流为主。
实际作业依据标准是
1、《全球定位系统(GPS)测量规范》(GB/T 18314-2007)
2、CJJ73-97《全球定位系统城市测量技术规程》;
3、GB/T 7929-1995《1:500、1:1000、1:2000地形图图式》;
4、CJJ8-1999《城市测量规范》;
5、GB/T 14804-93《1:500、1:1000、1:2000地形图要素分类与代码》;
6、《1∶500,1∶1000,1∶2000地形图图式》;GB/T7929—1995;
7、根据委托方提供的总平面布置图、平面控制测量和水准资料、用当地附近的控制成果资料。
5.1 仪器对比
5.1.1 全站仪综述
全站仪是一个由测距仪、电子经纬仪、电子补偿器、微处理机组合的一个整体。测量功能可分为基本测量功能和程序测量功能。基本测量功能包括电子测距、电子测角;程序测量功能包括水平距离和高差的切换显示、三维坐标测量、对边测量、放样测量、偏心测量、后方交会测量、面积计算等。特别注意的是只要开机,电子测角系统即开始工作并实时显示观测数据;其它测量功能只是测距及数据处理。它可以同时测量空间目标的距离和角度数据,直接得到三维坐标数据。
全站仪操作流程:
(1)首先要对仪器整平对中完毕后,对中偏差不得超过1mm;
(2)打开全站仪电源键,进入菜单选择文件管理界面,新建立一个文件名,并选择该文件在文件下存储;把已知两个点输入到新建的文件下面保存。
(3)仪器架设在其中一个已知点上;照准另一个后视点为检核点进行检核,偏差在限差范围内方可进行点收集,否则查明原因,符合限差要求方可采集数据;
(4)一切准备工作准备完毕后就可以采集碎部点数据信息。
全站仪注意事项
①一个测站应一个方向观测,切勿盘左盘右不分;
②一个测站仪器如有碰动需重新对中整平检核。
③必须要有可见光,而且光线不能太弱,因为全站仪虽然可以自动测量坐标、高程和距离、角度,但是,它也是必须要人眼主动照准目标的,没有光线或者光线太弱,人眼就很难发现观测目标。
④必须要光学通视,也就是说需要观测的目标和全站仪之间的连线上不能有任何遮挡物,如果存在遮挡物,要么造成人眼看不到,瞄不准目标,要么全站仪因为观测条件差的原因测量不出数据。
而且全站仪属于短距离测量,一般最长测距也就是1.5公里左右,再远的话人眼就难以观测到目标。
RTK的使用不需要很强的光线;RTK的主机之间不需要光学通视(确保是开阔的天空即可)。而且可以长距离作业。
5.1.2 RTK优势
应将基准站架设在测区的中央,并远离高压线和无线电发射塔50m以上。根据已知点进行点位校正和检核RTK的可靠性。基准站上的仪器应精确对中,严格整平,整平精度偏差不超过半格,对中不超过1mm。接收机接收卫星的高度角应设置为15°。基准站天线高度应在3个方向上量取3次互差3mm,取其平均值作为基准站的天线高度取至mm。
相对于GPS静态测量, RTK测量更容易出错,因此在实际作业中,应该加强检核,进行RTK质量控制。目前常用的方法列举以下几种。
1>已知点检核比较法
此方法要求测区内具有一定数量的已知控制点,它们中一部分参与测区转换参数的计算,另一部分用作RTK测量的检核点。在使用新求出的转换参数测定待定点之前,要先测出若干个检核控制点的坐标,以便检核转换参数的可靠性,发现问题及时采取改正措施。
2>快速静态比较法
此方法是在进行RTK观测的同时,对某些RTK点再进行一次快速静态观测,事后对这些点的RTK成果和快速静态成果进行比较分析。通过两种作业模式的比较,来检查RTK动态初始化的可靠性以及数据链的稳定性,从而检查RTK成果是否有质量问题。
3>复测比较法
此方法是在每次建立基准站后,先复测前一基准站上已测过的RTK点1~3个,并现场比较其成果,确认没有问题以后,才进行新的RTK观测。或是在每次重新初始化成功后,先复测附近已测过的RTK点1~3个,现场比较其成果,确认初始化没有问题以后,才进行新的RTK观测。如果附近有其他已知点,也可以在这些点上进行复测比较。
距基准站5km以内坐标差值小于1cm,高程差值小于2cm;5km-10km范围内坐标差值小于2cm,高程差值小于5cm。坐标差主要表现在RTK作业时,天线杆是否精确对中方面,高程差在10km以外则差值明显增大,一般一个基准站支持5km-7km的范围,这个范围内的RTK高程是可以达到等外水准要求的。由此说明RTK观测成果的质量是可靠的,在高速公路测量中坐标和高程精度是可以满足相应要求。
故流动站应在基准站控制转换范围以内,每次观测前应先对已知点或已测点进行检测,直到满足精度要求后再继续测量。再采集碎步点是保证RTK在固定时才能进行测量精度才能保证
经验证本测区转换参数是可靠的,实际工作中采取已知点检校法和复测比较法控制成果质量,即每次架设基准站后重测1-3个测量点,遇到已知点则检校已知点,确保每次测量成果的正确性。实践表明,已知点检校法和复测比较法具有实时性且方便快捷、更具实用性。
总 结
根据这个事例分析测区面积较大牵扯地物地貌较多;使用全站仪勘测界线非常复杂繁琐。由于勘测界址线是曲折无法判定的而全站仪又必须连续搬站容易造成误差传播影响界线精度。
针对本文章RTK测量提供实时坐标是优于其它测量方式的最主要方面。质量是工程的生命,应用RTK在界线测量中同样要做好质量控制。RTK测量的基准站和移动站之间进行比较差分,或两着之间的精确相对位置,他们之间连线的精度平面在1cm+1ppm X D,移动站所测量的每个点都是与基准站数据进行比较得出的结果,而基准站的位置是固定不动的,因此移动站所测量的每个点的误差都是相对于基准站的,而不是像全站仪那样是相临之间的两个点,这样一来,RTK就没有误差传播,也就没有误差累积了。故在本施测区域内使用是最节约人力、财力、物力的。提高了在勘测时的精度及进度。
参考文献
[1]孔祥云,郭际明,刘宗泉.大地测量学基础(第二版).武汉:武汉大学出版社,2005.
[2]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005.
[3]孔祥元,梅是义.控制测量学[M].武汉:武汉大学出版社,2001.
[4]国家测绘局.全球定位系统(GPS)测量规范GB/T·18314 [S].北京:测绘出版社,2009.
[5]国家测绘局.全球定位系统实时动态测量(RTK)技术规范CH/T20##-2010.
[6]顾胜东,刘长义.浅谈GPSRTK转换参数对平面精度的影响.第34卷第14期.2008.5.
[7]徐豁,陈顺华,何义斌,赵建虎.RTK确定高程的方法及其应用.(2003)70-0038- 02.
[8]卫柳艳. GPS网络RTK系统的算法及定位精度研究[D].河海大学硕士学位论文,2006.
[9]张正禄等, 工程测量学. 武汉:武汉大学出版社,2005.
[10]许昌,王超领.GPS高程转换的应用研究[J].北京测绘,2007.
[11]张效锋.浅谈全站仪在工程测量中的应用[J].安徽建筑,2002.
[12]尤秋阳.GPSRTK技术在地籍测量中的应用.武汉:测绘与工程出版社,2003.
[13]焦明连.GPS RTK高程拟合方法研究.淮海工学院空间信息科学系,江苏,2005.5.
[14]中海达公司 . Hi-RTK Road手簿软件说明书.
致 谢
历时将近两个月的时间终于将这篇论文写完,在论文的写作过程中遇到了无数的困难和障碍,都在同学和老师的帮助下度过了。尤其要强烈感谢我的论文指导老师卫柳艳老师,她对我进行了无私的知道和帮助,不厌其烦的帮助我进行论文的修改和改进。一遍又一遍地指出每稿中的具体问题,严格把关,循循善诱,在此我表示衷心感谢!同时我还要感谢在我学习期间给我极大关心和支持的各位老师以及关心我的同学和朋友。
感谢这篇论文所涉及到的各位学者。本文引用了数位学者的研究文献,如果没有各位学者的研究成果的帮助和启发,我将很难完成本篇论文的协作。
感谢我的同学和朋友,在我写论文的过程中给予我了很多的素材,还在论文的撰写和排版中提供热情的帮助
时间的仓促及自身专业水平的有限,整篇论文肯定存在尚未发现的缺点和错误。恳请阅读此篇论文的老师、同学,多予指正,不胜感激!
20##年5月15日