单片机运动控制系统设计
摘 要
本文介绍了利用红外反射式传感器实现小车自动寻迹的设计与实现。本设计中的小车能够自动识别路线 ,......。
......。
关键词:自动寻迹;传感器;单片机;机器人;数据采集
Abstract
This article introduces the design and execution of auto-searching for track by usage of the reflected infrared sensor on the auto-guided car. The car discern the routs automatically, .......
.......
Keyword: Auto-tracking;Infrared Sensor; Single-chip microcomputer; Robot; Data Collection
目 录
1 绪 论.................................................................... 1
1.1机器人的运动控制背景................................................... 1
1.2 本设计的应用及意义.................................................... 1
1.3 论文主要工作.......................................................... 1
2 系统总体方案.............................................................. 2
2.1 系统总体规划.......................................................... 2
2.2 单片机内部结构及接口描述.............................................. 2
2.3 技术指标.............................................................. 2
2.4 主要芯片的选型........................................................ 2
2.4.1 电机驱动芯片的选型................................................ 2
2.4.2温度传感器芯片的选型............................................... 3
2.5 其他芯片的简介........................................................ 3
2.5.1 ATMEL 93C46....................................................... 3
2.5.2 LCD1602........................................................... 3
2.5.3 74HC540.......................................................... 3
2.5.4 74HC245........................................................... 3
3 硬件设计与实现............................................................ 4
3.1系统运动控制部分设计................................................... 4
3.1.1 电机选型.......................................................... 4
3.1.2 L298N驱动电机.................................................... 4
3.2 寻迹模块设计.......................................................... 4
3.3无线电发射接收模块介绍................................................. 4
3.4测温系统设计........................................................... 5
3.5 电源.................................................................. 5
3.5.1电源的选型......................................................... 5
3.5.2稳压电路设计....................................................... 5
3.5.3抗干扰设计......................................................... 5
4 测试及其控制程序设计...................................................... 6
5 总结与展望................................................................ 7
致 谢...................................................................... 8
参考文献.................................................................... 9
附录1 机器实体照片........................................................ 10
1 绪 论
近年来,人类的生产和生活方式发生了巨大的变化,产生这一变化的重要原因就是计算机技术的飞速发展。第一台计算机诞生至今仅仅几十年的时间,计算机的性能已经大大提高,价格不断的下降,从而使之可以迅速而广泛地应用于人类的生产和生活的各个领域。然而机器人的发展无疑得益于计算机技术的发展。
......
1.1 机器人的运动控制背景
什么叫机器人?
......
1.2 本设计的应用及意义
本文的设计正是一个本着学习、创新和服务人类的思想的机器人设计。让机器按照自己预定的想法和目的运作,一直是我人生的追求和梦想。我选择自动化专业,正是要加入自动化这个大家庭,吸收文化不断提高自己,不断的走近自己的梦想。
.....
1.3 论文主要工作
本论文主要的工作就是通过一个自动寻线小车的软件、硬件和整体结构的设计和实现,......。
2 系统总体方案
本章围绕系统的总体设计,介绍系统组成框图、主控芯片单片机的内部硬件资源及其接口技术、整个机器人系统所用到的其它IC的介绍。
2.1 系统总体规划
整个系统的构成是由两部分组成。一部分的用于整个机器人系统的运动控制, 一部分的机器人体内装载的传感器件,负责检测和采集现场的环境参数。
......
2.2 单片机内部结构及接口描述
......
......,P3口也接收一些控制信号,如表 2-1所示。
表 2-1 各口线的特殊功能和信号名称

......
2.3 技术指标
......
2.4 主要芯片的选型
......
2.4.1 电机驱动芯片的选型
考虑到,本机器人需要的驱动能力比较高,......。
......,外型如图2-4示。
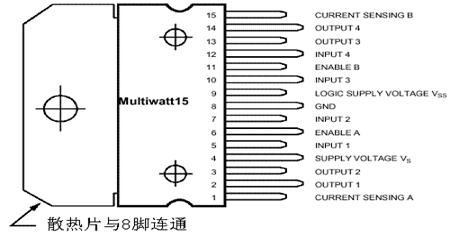
图2-4 L298N外型
2.4.2 温度传感器芯片的选型
考虑到......。
2.5 其他芯片的简介
本设计是......。
2.5.1 ATMEL 93C46
IC:93c46是储存器件(如图2-6示),负责储存机器人系统中温度采集系统采集到的温度参数。
......
2.5.2 LCD1602
......
2.5.3 74HC540
......
2.5.4 74HC245
74HC245是8总线收发......。
......
3 硬件设计与实现
本设计的机器人采用废弃的电脑光驱机盒钢板做为整个硬件体系的骨架,......。
3.1 系统运动控制部分设计
3.1.1 电机选型
......
3.1.2 L298N驱动电机
......
L298N芯片已在电机驱动芯片的选型一节介绍过,本设计中具体应用电路进行说明,如图3-1示。
......
3.2 寻迹模块设计
......
3.3 无线电发射接收模块介绍
本设计采用辅助模块,无线电发射模块原理图如图3-14示,就是为了达到远程手动控制的目的,由于无线电的设计涉及的学科知识面比较广,调频比较困难。故此本设计直接应用市场上的成品无线电模块,出于成本的考虑,选用的无线电的有效控制距离是比较短的,但是这个不限制本设计功能的实现,距离的远近用户完全可以根据需要更换模块。
......
......................................,驱动电流约2mA,与发射器上的四个按键一一对应。
......,表3-1中5个输出引脚10、11、12、13、VT的“0”代表低电位OV,1代表高电位5V。
表3-1 接收模块输出电位表

续表3-1

3.4 测温系统设计
本设计采用LCD1602作为显示器件,相比数码管显示,显示内容丰富更加丰富、显示方式更为灵活,而且硬件电路得到简化。LCD1602作为一款非常经典的液晶显示模块,具有良好的性价比,完全符合和满足本设计的要求。
......
3.5 电源
3.5.1 电源的选型
由于本系统需要电池供电,我们考虑了如下集中方案为系统供电。
......
3.5.2 稳压电路设计
......
3.5.3 抗干扰设计
由于此单片机控制的运动系统,工作在各种恶劣的环境中,所以抗干扰处理是必不可少的。
......
4 测试及其控制程序设计
......
5 总结与展望
......
致 谢
自从我接触单片机,到现在能够用以单片机为控制核心设计出我的毕业设计——单片机运动控制系统设计。这是一个学习的过程,......。
......
参考文献
......
[12] 高稚允,高岳. 光电检测技术[M]. 北京:国防工业出版社,1995.
[13] 金篆芷,王明时. 现代传感技术[M]. 北京:电子工业出版社,1995
[14] 罗志增 .简易红外接近觉传感器 [C].全国青年第三届机器人学研讨会论文集 ,1990.
[15] Brian W. Kernighan & Dennis M. Ritchie . The C Programming Language (The second Edition). Prentice-Hall , 1988.
......
附录1 机器实体照片
0011000
0
第二篇:20xx毕业设计论文要求0311
毕业生毕业设计(论文)规范化要求
一、文科各专业毕业论文的写作程序大体分为四个阶段:
阅读文献、收集资料 ;拟定写作提纲;撰写初稿;修改定稿。
文科各专业的毕业论文要求观点正确(含明确)、论证充分、资料翔实、文字流畅简练、布局合理、结构严谨、理论联系实际、有一定的独到见解;一律采用文内图表,引文出处和注释一律采用文尾注;用A4纸打印,格式规范,标点符号正确。
二、理工科各专业毕业设计(论文)的写作程序大体分为五个阶段: 阅读文献、收集资料;工程(工艺)设计或实验(试验)研究;理论分析和技术经济分析;撰写设计报告或论文初稿;修改定稿。
理工科的毕业设计(论文)要求设计方案合理、立论准确、理论分析和技术经济分析充分 、实验(试验)和计算的方法正确、各方面的数据可靠、图表规范清晰、文字表达的语言流 畅简练准确;原则上采用文内图表,不能采用文内图表的制图、制表规格可根据实际需要而定,以附件的形式附在毕业设计(论文)正文后,引文出处和注释一律采用文尾注;用B5纸打印,格式规范,标点符号正确。
三、毕业设计(论文)的内容及格式要求
1、论文题目
论文题目应该简短、明确、有概括性;字数要适当,一般不宜超过20个汉字。
2、论文摘要
论文摘要以简要文字介绍研究课题的目的、方法、内容及主要结果,中文摘要字数一般不多 于300字。英文摘要应与中文摘要基本对应。
3、关键词
关键词是表述论文主题内容信息的单词或术语,关键词数量一般为3-6个,总字数不超过20个。
4、目录
目录作为论文提纲,是论文各组成部分的小标题,文字应简明扼要。目录按论文顺序分章、 节二级编写,要标明页数,以便阅读。章、节、小节分别以 1、
1.1、1.1.1等数字依次标出。目录中的标题应与正文中的标题一致。
5、前言
前言是全篇论文的开场白。内容主要包括选题的缘由;对本课题已有研究情况及存在问题的评述;本文所要解决的问题等。
6、正文
正文是对研究工作的详细表述,一般由标题、文字、图、表格和公式等部分组成。
7、结论
结论是全文的思想精髓和文章价值的体现。应概括说明所进行工作的情况和价值,分析其优 点和特色,指出创新所在,并应指出其中存在的问题和今后的改进方向,特别是对工作中遇 到的重要问题要着重指出,并提出自己的见解。它集中反映作者的研究成果,表达作者对所 研究的课题的见解和主张,结论要简单、明确,篇幅不宜过长。
8、致谢
在文章结尾处,通常以简短的文字,对工作过程中曾给自己以直接帮助的人员,例如指导老师、答疑老师及其他人员,表示自己的谢意。这不仅是一种礼貌,也是对他人劳动的尊重,是治学者应有的思想作风。
9、参考文献
参考文献指作者在毕业设计(论文)工作中所参考的文献,包括研究背景、研究方法、研究结 果的比较等,是毕业设计(论文)不可缺少的组成部分,也是作者对他人知识成果的承认和尊 重。毕业设计(论文)的参考文献必须在文中引用处体现出来,并按顺序编号。引用文献应按文中引用出现的顺序列全,附于文末。
10、附件
附件是不宜放在正文中的资料,如调查阅卷、公式推演、编写程序、原始数据附表等等。放 入设计(论文)资料袋。
专科设计(论文)要求不少于5000字,本科不少于8000字。
四、打印规范
一律用A4规格复印纸输出,上边距为2.5cm,左边距为3cm,右 边距为2cm,页脚1.5cm,单倍行距;正文页码居中。打印格式为:
1、封面。由学校统一印制,学生填写或打印。填写时应注意:字号填写完整,例如“971103”,不能填写“3号”或“03”等,专业名称填写本专业的全称。若要自行打印封面,打印格式必须与学校统一印制的格式一致。题目用二号黑体字,其它项目用四号宋体字。
2、作者、指导教师均填写在封面上。指导教师一栏应填写教师姓名及职称。
3、题目、摘要和关键词
论文(设计)题目为小二号黑体字,可以分为1或2行居中打印。
论文(设计)题目下空一行,左起用四号黑体打印[摘要]二字。
[摘要]后折行,用小四号字打印摘要内容。
摘要内容下空一行,左起用四号黑体打印[关键词]三字。其后为关键词(小四号宋体),每两个关键词之间空两格。
题目、中文摘要、关键词合打一页。
4、“目录”二字用四号黑体居中打印。下空一行为章、节、小节及其开始页码,采用小四号宋体。页码放在行末,目录内容和页码之间用虚线连接。
5、“前言”用三号黑体字居中打印。折行用小四号宋体打印前言内容。
6、标题:每章标题以三号黑体字居中打印;节标题、小节标题,以四号黑体左起打印。换行打印论文(设计)正文。
7、正文:采用小四号宋体字打印。
8、结论二字用三号黑体字折行打印。折行用小四号宋体打印结论内容。
9、致谢二字用三号黑体字折行打印。折行用小四号宋体打印致谢内容。
10、参考文献。“参考文献”四字用三号黑体字折行打印。内容用小四号宋体字。引用格式按《成都理工学报》(自然科学版)或(哲学社会科学版)的要求进行。
五、装订顺序
毕业设计(论文):封面→题目、摘要关键词→目录→前言→正文→致谢→参考文献。