�Զ���⼼���ܽ�
ʱ����ţ�һѧ��ת�ۼ��š����ݵ����£������DZ�ó����ˣ���ѧϰҲ�����µ���ʶ���µ��˽⡣���������Զ���⼼���γ̣��ӳ�ʼ���˽⣬��������������ɵ�֪̽�������ѧϰ�Ĺ��̡�
��������ø�������ЧӦ��ѡ����ʵķ�����װ�ã������������У�����ȸ�������й���Ϣ������ķ������趨�Ի�������Ĺ��̡����Զ������������鴦�����̵ļ�����Ϊ�Զ���⼼��
�Զ���⼼�����Զ�����ѧ������һ����Ҫ��֧��ѧ�����������DZ���ʹ�á����ơ��������Ļ����Ϸ�չ������һ���ۺ��Լ������Զ��������ڲ����ͼ����������ȫ����Ҫ�����Ҫ���ٵ��˹���Ԥ���Զ����в���ɵġ�ʵ���Զ�����������Զ���ˮƽ�ͳ̶ȣ�������Ϊ�������غ���Ϊ�������������������̻��豸�Ŀɿ��Լ�����Ч�ʣ����Դ�����Ϊ���ĵļ��ϵͳ��
һ�� ��⼼���Ļ���֪ʶ
��⼼�������о��Զ����ϵͳ�е���Ϣ��ȡ����Ϣת�����Լ���Ϣ���������ۺͼ���Ϊ��Ҫ���ݵ�һ��Ӧ�ü���ѧ�ơ�Ȼ�����Զ����ϵͳ���Զ��������Զ��������Զ��������Զ���ϡ��Զ��źŵȴ���ϵͳ���ܳơ�
����������
��һ���������ı궨
��ʹ�ô�����֮ǰ���������б궨���Ա�֤ʹ�ù����������źŵ�ȷ�����á���ʵ��ķ������ҳ�����������Ĺ�ϵ����ȷ��������������ָ�ꡣ�Բ�ͬ���������ͬ��Ҫ���Լ���ͬ�Ĵ������в�ͬ����ı궨�������������������ź�����ʱ��仯���ɷ�Ϊ��̬�궨�Ͷ�̬�궨��
��������������ѡ��
ѡ�ô�������Ҫ��ɹ���Ϊ�������棺��һ����������Ҫ����Ҫ��������Ŀ�ġ���������ѡ������Χ����������������źŲ�����Ƶ�ʡ������źŵ�Ƶ���Լ��������ȡ����������ʱ��ȡ��ڶ����Ǵ�������������Ҫ����Ҫ�������ȡ��ȶ��ԡ���Ӧ�ٶȡ��������𡢶Ա����������ĸ���ЧӦ��У�����ڡ�����˱����ȡ���������ʹ������Ҫ����Ҫ�������ó��صĻ������������蹦���������������豸������ƥ�䡢������ά����ȡ�
7��������������
������ЧӦ���������������ڱ仯�Ĵų��У�����ı�����е��������������������ڽ����������бպϣ������ɵ�Ÿ�Ӧԭ������������״��Ӧ������Ϊ���������������Ϊ������ЧӦ ��1�����������������Ļ���ԭ��
���ݷ����ڵ�Ÿ�Ӧԭ������״�����������ڱ仯�Ĵų��л��ڴų������и�������˶�ʱ��������Ƿ��״�أ����и�仯�Ĵų�ʱ���������������ڽ�����������״�ĸ�Ӧ�������˵����е����������������Ϊ������ЧӦ�������ݵ�����ЧӦ�ƳɵĴ�������Ϊ������ʽ��������
4��ʵѵ�ĵ�
��ͨ��һ�ܵĴ�����ʵѵ�����У���ѧ����һ����֪ʶ��ͬʱҲ����һЩ���⣬����ͨ����ʦ��ָ����ͬѧ�İ������Ҷ���˳������ˡ�ͨ���Ե���Ԫ�������ܺͽṹ���˽��������ʶ���Լ��Ե�·�������ƺ滮��������ʶ������ʵѵ���У�Ҫ�ද�֡���˼���������ʣ����ܸ��á������������ѵ�רҵ֪ʶ�Լ��Լ����˵Ķ�����������Ҫ���������Dz��¿ࡢ�����۵ľ�����ʲô��Ҫ�����IJ��н������ر����ں�����ʱ����Ҫ����
���ĺ�ϸ�ģ����ܰ�һЩ��С�ĵ���Ԫ���Ӻã��ѵ�·�庸�ӵüȾ����ֺ��á�
ͨ�����ʵѵʹ�Ҷ�����������ʵ�������Ǻ���Ҫ�ģ�ֻ������֪ʶ��ԶԶ�����ģ�ֻ�а���ѧ������֪ʶ��ʵ�������������������еó����ۣ��Ӷ�����Լ���ʵ�ʶ��������Ͷ���˼����������
������Ҫлл��ʦ�����ĸ�����Ҳ��лͬѧ�İ��������ǹ�ͬŬ����������⣡��ˣ���Ҳ���ã���ʱ�Լ��ò����Ĵ𰸣�����Ҳ�������Լ�������ڴ�����Ϊ���徫��Ҳ�Ƿdz���Ҫ�ģ�
�����ţ�ͨ����һ�ܵ�ʵѵ���������ҵ�ѧϰ�����˽���������Ӱ�쵽�ҵ�����У��������˸��õ�������ʶָ�������Ŭ����ѧϰ��
�ڶ�ƪ�����ܼ�⼼����ϰ�ܽ�
���ܼ�⼼����ϰ�ܽ�
1�������ǽ��������������DZ�(ר�ż�������)������ʵ��ͼ��㷽���Ա�����ȡ�ö��Ի�����Ϣ����ʶ����
2�������Ļ�������1��ֱ�Ӳ������Ӳ����������ֶΣ�2������������ջ���������3��ƫ�����λ�������������ʽ��
3������װ�õĻ������ܣ���Ҫ����ָ�꣺ ���ȣ����ܶȡ�ȷ�ԡ���ȷ�ȣ����ȶ��ԡ�����������ԣ�����װ�õľ�̬���ܣ����Զȡ������ȡ��ͻ���
4��������������DZ����ȵȼ��Ĺ�ϵ����ȷ��һ���DZ��ľ��ȵȼ�ʱ��Ҫ���DZ����������Ӧ�ô��ڻ�����DZ�У��ʱ���õ�����������������ݹ���Ҫ����ѡ���DZ��ľ��ȵȼ�ʱ���DZ����������Ӧ��С�ڻ���ڹ����������������������
5��ϵͳ��� ���壺ͬһ�����£�����ظ�����ͬһ��ʱ����С�ͷ��ű��ֲ����һ�����ɱ仯�����ص㣺��һ�����ɵģ�һ���ͨ��ʵ�������ķ����ҳ�����ɺ�Ӱ�����أ�������Ӧ��У��������ʩ����������������С����������ԭ��ϵͳ�����Ҫ�����ڼ���DZ������IJ����ơ������ʹ���DZ��ķ�������ȷ�Լ������߹��еIJ���ϰ�ߵ�����ġ�
6�� ������ ���壺����ͬ�����£�����ظ�����ͬһ��ʱ����С�����ž�Ϊ���ɱ仯���� �ص㣺�仯����Ԥ�⣬��������ֻ��ͨ�����۵ķ�ʽ���й��ơ���������ԭ����������Ҫ�����ڲ���������ij����δ��ʶ�Ļ������Ƶĸ���������أ�������Ŷ��������Ŷ�����ų��ȣ���������ۺϽ����
7�� ��ʧ��� ���壺���Ե�����������������ص㣺���κι��ɿ�ѭ�� ��������ԭ�������ԭ����Ҫ�����ڲ����ߵĴ��ģ��������������ݵȣ�������ȷ������ʵ��������ͻ���ʵ��״����δ�ﵽԤ���Ҫ�����æ���Ե�ԭ������ɵġ���ʱ������ʧ���IJ���ֵ��Ϊ�쳣ֵ��ֵ��Ӧ�Ӳ������������
8��ϵͳ�����б� a.�̶�ϵͳ�����б�:���ڲ���ʱ��仯��ϵͳ��ͨ�����á�ʵ��ȶԡ��ķ����б�ʵ�鷽��Ϊ�ı����ϵͳ������������ͬ���IJ������Ա㷢�����b.���ϵͳ�����б�(2)�����Ʒ��� c��̬�ֲ��Ƚ��б�
9����̬�ֲ���������������������ͳ�����ԣ� �����ԡ��Գ��ԡ��н��ԡ��ֳ���
10����������ָ�ܹ����ܹ涨�ı�����������һ������ת���ɵ�ѧ������IJ���װ�á�һ��������Ԫ����ת��Ԫ����������·������Դ�IJ�����ɡ�
11���������ķ�����ܶ࣬һ��ɰ�����������������ԭ����������ϵ������ź����������ࡣa��������������ԭ�����ࣺ1)���ṹ�ʹ���������������ʽ������2)�������ʹ����� �����������衡 b����������ϵ����:��Դ������:������������� �����ȵ�ż������;����Դ���������������Դ ��������ʽ������
12��������������������ϵ�����Ǵ������Ļ������ԣ��о�̬���ԺͶ�̬����֮�֡���ν��̬���ԣ���ָ����������̬�ź������£����������֮��Ĺ�ϵ���ԣ����������Ķ�̬������ָ�������ڲ�����̬�ź�ʱ���Լ��������룩����Ӧ����������ԡ�������������̬���Ե���Ҫ����ָ�������Զȡ������ȡ����ͺ��ظ��ԡ�һ�״������Ľ�Ծ��Ӧ����Ҫ�Ķ�̬����ָ����ʱ�䳣����һ��ϣ����ԽСԽ�ã����״������Ľ�Ծ��Ӧ���͵Ķ�̬����ָ���������ʱ�䡢��ֵʱ�䡢��Ӧʱ���������ȣ�һ��Ҳϣ�����ǵ���ֵԽСԽ�á�
13�����������ı궨��Ϊ��̬�궨�Ͷ�̬�궨���֡���̬�궨��Ŀ����ȷ����������̬����ָ�꣬�����Զȡ������ȡ����ͺ��ظ��Եȣ���̬�궨��Ŀ����ȷ���������Ķ�̬���Բ�������һ�״�������ʱ�䳣�������״������Ĺ���Ƶ�ʺ�����ȵȡ�
14���������ļ����ص�a�����ݷ�Χ������ɢ:�������漰������ѧ��������֮��ȱ����ϵ���Ӷ���ѧϰ����һ�����Ѷȡ�b��֪ʶ�ܼ��̶ȸߡ���Եѧ��ɫ�ʼ�Ũc���������ӡ�����Ҫ���d�������š����ܺ�e��Ʒ�ַ��ࡢӦ�ù㷺 ����ѹ�������� ��������Һλ������ˮ���ɽ�߶�; ҽ���ϣ���Ѫѹ������ѹ���������ϣ����и߶ȡ��ٶȡ������ٶȵ�
15������ʽ����������: ������ǵ�������λ�ơ�Ӧ�䡢���¶ȡ�ʪ�ȡ�����Ũ�ȵȣ��ı仯ת���ɵ�����ϵĵ���仯��װ�ã���Ϊ����ʽ��������
���ǽ��ǵ����ı仯�������õ���Ԫ�����任����һ����ϵ�ĵ���ֵ�ı仯����ͨ�����Ӳ��������Ե���ֵ���в������Ӷ��ﵽ�������ǵ���������Ŀ�ġ�
�ص�:����ʽ���������нṹ��������ȸߣ����Ժ��ȶ��Ժõ��ŵ㣬��ˣ����ڷǵ��������Ӧ��ʮ�ֹ㷺��
���ࣺ ��ת��ԭ���ɷ�Ϊ��λ��ʽ���ȵ���ʽ��ѹ����ʽ����������ʽ�ȵ�
16����λ��ʽ����������:�������ı仯���µ�λ����ֵ�仯������Ԫ����Ϊ��λ����������
�ص�:�������Ľṹ���۸���ˣ�����һ���Ŀɿ��ԣ�������ʴ�����������ijЩ�����»���ʹ�á�
��λ��ʽ�������ṹ����:���ɵ���Ԫ���͵�ˢ�����ͷ����������������ɡ����ṹ��ʽ�ɷ�Ϊ����ʽ�ͷ�����ʽ��λ��.
17����λ���ĸ����������ߡ���λ������Խ�أ�RLԽС��������ϵ��mԽ����������ѹAԽС�������ѹUoԽ�ͣ�����������Խ��֮��UoԽ�ߣ����������ԽС��
18�����������Ƶ�λ����ָ�������ѹ������裩���ˢ�г�x֮����з����Թ�ϵ�ĵ�λ���������Ͻ������ֵ�λ������ʵ���κκ�����ϵ�����ֳ���Ϊ������λ����
19 �������ȵ���:�ȵ��製�����壨����Ҫ���֣�����Ե�ܣ����ߺ�
20����Ϊ�ȵ���IJ���Ҫ�����¶�ϵ��Ҫ��������ȵ���������ȣ������ʾ����ܴ��Ա��С������ߴ磻������ҪС���Ա�����ȵ������Ӧ�ٶȣ��ڲ�����Χ�ڣ�Ӧ�����ȶ��������ͻ�ѧ���ܣ��������¶ȵĹ�ϵ��ýӽ������ԣ�Ӧ�����õĿɼӹ��ԣ��Ҽ۸���ˡ�ʹ����㷺���ȵ�������Dz���ͭ
21�������ȵ���
n �� ���ȵ���:��Ҫ��Ϊ�������¶ȼƣ��㷺Ӧ�����¶Ȼ������Ĵ��ݡ�
n �� ͭ�ȵ��� ����������Ҫ�����¶Ƚϵ͵ij��ϣ�������Χһ��Ϊ��50��150�档
n �� ���ȵ��� Ŀǰ��ò��ϳ�ʱ���ȶ��ĸ����Կɴ�10-4 K ����Ŀǰ���¸�������õ�һ���¶ȼơ�
n �� ͭ�ȵ��� Ӧ�ã���������Ҫ�����¶Ƚϵ͵ij��� ������Χ����50��150��
�� �㣺�¶ȷ�Χ�����Թ�ϵ�ã������ȱȲ�����ߣ������ᴿ���ӹ����۸���ˣ��������ܺá�
n ȱ�㣺����������һ��ֻ����150�����µĵ��²�����û��ˮ�ּ�����ʴ�Խ��ʵ��¶Ȳ�����
�벬��ȣ�ͭ�ĵ����ʵͣ�����ͭ���������ϴ�
22���뵼���������裺���ð뵼��ĵ���ֵ���¶������仯�������Ƴɡ��ɽ���������ͻ����ﰴ��ͬ���䷽�����ս�
�ŵ㣺 (1) ����������¶�ϵ���Ƚ�����4��9���� (2) �����ʴ����С���ȹ���С�����ڲ������¡������¶ȼ����ٱ仯���¶ȡ� (3) �ṹ����е���ܺá�ȱ�㣺���ԶȽϲ�����Ժͻ����Բ
23���¶�ϵ��(PTC)���¶�ϵ��(NTC) �ٽ��¶�ϵ��(CTR)
PTC�������裭���¶�ϵ���� ��;���ʵ����ţ����ֵ����豸�Ĺ��ȱ���������Դ�Ķ��¿��ƣ�����Ԫ����
CTR�������裭���¶�ϵ���� ��;���¶ȿ��ء�
NTC�������裭�ܸߵĸ������¶�ϵ������;�����¡������¶ȡ��²�³��Ȳ����Զ����Ƽ�������·���Ȳ�����·
24��ntc ��������
n ����̬����£�ͨ����������ĵ���I�������˵ĵ�ѹU֮��Ĺ�ϵ��
n ��������a��������������ĵ�����Сʱ:������ʹ֮���ȡ�����ֵֻ�����ڻ����¶ȣ�����������ֱ�ߣ���ѭŷķ���ɡ���Ҫ�������¡� b����������һ��ֵʱ��������������ĵ���ʹ֮���ȣ������¶����ߣ����ָ������ԡ�������С����ʹ�������˵�ѹ�����½������������ߵ��¶��뻷������(��Χ�����¶ȼ�ɢ������)�йء�����������Χ�����¶�һ��ʱ����������ĵ���ֵȡ���ڽ��ʵ����١��������ܶȵ�ɢ�������������������������ٶȺͽ����ܶȡ�
25���ȵ���ʽ��������Ӧ��
A���뵼���������贫���� Ӧ�÷�Χ�ܹ㣬��������ɴ���ҽѧ����ҵ�����õ����ȷ����������¡����¡��¶Ȳ��������ٲ�����Һ��ָʾ�ȡ�2���뵼���������贫������ �¶Ȳ��� �� �¶ȿ��� �� �¶Ȳ��� �� ��������
�������������ϵ��������ĺͽ������ٵĹ�ϵ���Բ������������١����ٵ�
b�������ȵ��贫����
a/��ҵ�㷺ʹ�ã���200��+500�淶Χ�¶Ȳ���������������£������ĵ��¶˿ɴ�3.4K���������ͣ�1K���ҡ����¶˿ɲ1000�档
b/�¶Ȳ������ص㣺���ȸߡ����ڲ���¡�
c/�������IJ�����·������ʹ�õ��ţ� ���Ƚϸߵ����Զ����š�
Ϊ�����������ӵ��ߵ����滷���¶ȱ仯����ɵIJ����������������ƺ����������ӷ���
d/�����µ���ȱ�㣺��Ӧ�ٶ����������������ڲⶨ��խλ�õ��¶ȡ�
����ʹ���ܴ���ȸ�������ȱ��ļ�ϸ����װ�����µ��裬���ʹӦ�������һ������
e/��ҪӦ�ã�������ʯ�ͻ����ĸ��ֹ��չ��̣���ά�ȹ�ҵ���ȴ������գ�ʳƷ��ҵ�ĸ����Զ�װ�ã��յ����䶳��ع�ҵ����ͺ��ա��ﻯ�豸�����²�
����˿�ȵ�����Ϊ���崫������Ӧ��
26���Ը�ʽ����ǣ����ò�ṹ���������·Ϊ�������첨�Ľ������š���������ĺ�ȷ����仯ʱ�������������ƶ���������������λ�ƣ��Ӷ��ı����ϡ�����϶�ľ��룬ʹ��Ȧ�ĵ����������Ӧ�ı仯���˵�б仯�������������첨�Ľ������Ų������Ͳ����DZ���ʾ�����С�뱻����ĺ�ȳ����ȡ�
26��������ʽ������
a��ʱ�ų������ܵ����, ����L2�Ĵ�ͨ������Ϊ���䣱, �Ӷ�ʹL2�����ĸ�Ӧ��ѹU2�½���������Խ��, ������ʧ��Խ��, U2��ѹ��ԽС�����, �ɸ���U2��ѹ�Ĵ�С��֪���������ĺ��, ��ʽ������ȴ�������ⷶΧ�ɴ�1��100mm, �ֱ���Ϊ0.1��m, ���Զ�Ϊ 1%��
���������ĺ�ȸı���Ϊ����, ���������������֮��ľ���Ҳ�ı���һ������, �������������ѹ��ʱΪ2Uo+��U����U���Ŵ����Ŵ��, ͨ��ָʾ�DZ���·����ָʾ�����ĵĺ�ȱ仯ֵ�����ĺ�ȸ���ֵ��ƫ��ָʾֵ�Ĵ����;��DZ�����ĵĺ�ȡ� ��
b�IJ���:������ʽ�����������Ӵ��ز������������Ƶ�ֲ��������ֻ�������ѹ�����г��õ�����ʽ���������������ľ���������Ҳ���Բ�������������ҶƬ����������о�������ʱ���������ý���������������ڻ����IJ�ͬ��λ���м��ķ������õ�����λ�õ����ֵ����λֵ���Ӷ���������ͼ��
c.������̽��:���õ�����ʽ���������Լ������������ƣ��ȴ������ƣ��Լ����ӵ�ȱ�ݵȡ���̽��ʱ��������Ӧ�뱻��屣�־��벻�䡣���ʱ���������ݳ��֣���������絼�ʣ��ŵ��ʵı仯���Ӷ����������ѹ��ͻ�䡣
27�� ����Ӧ��ЧӦ���壺�����뵼��������ܵ��������������ѹ��������ʱ��������е���Σ���е���ε�������ֵ�仯���������α��ʹ����ֵ�����仯�������Ϊ����Ӧ��ЧӦ��
n ԭ�� ����˿������ϵ��K0����������Ӱ��һ�ǽ���˿��������ϼ��γߴ�ı仯�� ��1+2��
n ���ǽ���˿��������ϵĵ����ʷ����ı仯�� ����d��/����/���� �Խ������ϣ�1+������(d��/��)/��
1������դ:
2.����Ƭ ����Ƭ�������DZ�������դ�����ߵļ�����״�����λ�ã������о�Ե���á�һ��Ϊ���0.02��0.05mm�Ļ�����֬����ȩ��֬�Ƚ������ϡ�
3.���� ���ã���������դ����ӵ��ߡ�
4.ճ������ã�������դ�̶��ڻ�Ƭ�ϣ�������Ƭ�����ճ����һ��ʹ��ʱ����ճ�����Ӧ��Ƭճ�����Լ���ijһ�����λ�ã��Ա�����Լ���Ӧ�䡣
28���뵼�屡Ƭ���ڴų��У������ĵ���������ų�����һ��ʱ���뵼�屡Ƭ��ƽ���ڵ����ʹų������������֮������綯�ƣ���������ƻ���ЧӦ�� �����ĵ綯�Ƴƻ������ơ� �뵼�屡Ƭ�ƻ���Ԫ��
29������Ԫ���ĵ������(1) UH-I���ԣ��ڴų��ͻ����¶Ⱥ㶨�������£����Ƶ��������Ԫ�����֮��Ĺ�ϵ��ΪUH-I���ԣ���Ϊ���Զ�ʮ�����õ�����(2) UH-B���ԣ������Ƶ����㶨ʱ�� UH-B�������߲���ȫ�����Թ�ϵ��ֻ�е�B<0.5ʱ�����ԶȲŽϺ�(3) R-B���ԣ�����Ԫ������������������Ÿ�Ӧǿ��B֮��Ĺ�ϵ��ΪR-B���ԡ�����ų�����ֵ���Ӷ����ӣ��������Ϊ����ЧӦ����ʹ����������ͣ�Ӧ��ȡ������ʩ��
30�� ��λ���䲹�� �����壺����Ԫ���ڲ��ӿ��Ƶ����Ӵų�ʱ�����ֵĻ������Ƴ�Ϊ��λ�����ȵ��ơ�����ֱ�����ơ���Ӧ����ƺ��Լ�������ƾ�����λ�����ơ�
A������λ�������IJ��������ѻ���Ԫ����Ϊһ���ı۵�����ţ�����λ���ƾ��൱�ڵ��ŵij�ʼ��ƽ�������ѹ�� ���ƵIJ�����· �ԳƵ�·
B�� ������Ԫ���ڽ���������ų��й���ʱ����ʹ���ӿ��Ƶ��������ڻ����缫�����߲��ò��������������·��Ҳ��������Ӹ�Ӧ�綯�ƣ���Ϊ��Ӧ����ơ��������߹��ɵĸ�Ӧ���A�����ȡ�
C�����Ƶ��������Ĵų���Ϊ�Լ����������������߰��Ų�������������ӵĻ���������õ��Ƴ�Ϊ�Լ�������ơ������������������ŵ����������ߡ�
31���¶�������ԭ����Ԫ���Ļ�Ƭ�ǰ뵼����ϣ�������¶ȵı仯�����С���������Ũ�Ⱥ�������Ǩ���ʡ������ʺͻ���ϵ�������¶ȵĺ�����
���¶ȱ仯ʱ������Ԫ����һЩ���Բ�������������ơ����������������ȶ�Ҫ�����仯���Ӷ�ʹ����ʽ�����������¶���
32����С����Ԫ�����¶���� ��ѡ���¶�ϵ��С��Ԫ�������ú��´�ʩ�����ú���Դ����
a ����Դ�¶Ȳ���
���������Ԫ�����¶�ϵ��������ֵʱ�����ǵĻ����������¶ȵ����߶����ӣ�1+����t������ͬʱ���ÿ��Ƶ���I��Ӧ�ؼ�С���ܱ���KHI����͵���������ϵ��ֵ���ӵ�Ӱ�졣
33�����ų��ͻ����¶�һ��ʱ:������������Ƶ���I������
�����Ƶ����ͻ����¶�һ��ʱ:����������ų��ĴŸ�Ӧǿ��B������
�������¶�һ��ʱ: ����Ļ���������I��B�ij˻�������
������ķ������Կ�����Ӧ�û���ʽ���������Էֱ���������ų���������
a �����Ƶ���Ϊֱ������ʱ:Ϊ�˵õ��ϴ�Ļ���������ɽ��������Ԫ����������������ǿ��Ƶ������������
b �����Ƶ���Ϊ��������ʱ
c ���ò�Ŵ��·��������ѹ�Ŵ�
34��Ӧ�ã�1. ��Ų����������㶨�Ļ�ĴŸ�Ӧǿ�ȡ��й����ʡ������ʡ���λ�����ܵȲ�����
2. ����λ�ơ�ѹ���IJ�����
����ԭ��������������Ÿ�Ӧǿ�ȳ����ȣ����Ÿ�Ӧǿ����λ�õĺ�������������ƵĴ�С�Ϳ���������ӳ����Ԫ����λ�á�
Ӧ�ã�λ�Ʋ���������ѹ����Ӧ�䡢��е�����ٶ�
�����ݶȴų���ʾ��ͼ
35���ȵ�ż���������ص�
�ŵ㣺1.�ܲ����ϸߵ��¶ȣ����·�Χ��-180��2800°C
2.�������㣬����Զ���봫����Զ���¼3.�ṹ��ȷ�ɿ�4.���������ȹ���С�������ڿ��ٲ���
ȱ�㣺1.����źź��¶�ʾֵ�ʷ����Թ�ϵ
2.����Χ�������Ƚϵ�
36���ȵ�ż�������IJ���ԭ��
37��.�ȵ�ЧӦ�����ֲ�ͬ���ϵĵ����뵼�����ɱպϻ�·�������ӵ�ֱ������¶�ΪT��T0����Դ�У��û�·�ڻ�����ȵ��ơ��ȵ��ƵĴ�С��ӳ�����ӵ��¶Ȳ����T0���䣬�ȵ��������¶�T�仯���仯������ȵ��Ƶ�ֵ������֪���¶�T�Ĵ�С��
(4)�ο����¶��Զ����������������ŷ��� �������ŷ������ò�ƽ����Ų����IJ�ƽ���ѹ��Ϊ�����ź�, ���Զ������ȵ�ż������������ο����¶Ȳ�Ϊ0���仯�������ȵ��Ƶı仯ֵ��
�κ�ϰ��𰸣�
1��1ʲô�Dz����ľ����������������
�������IJ���ֵx�뱻��������ֵA0֮��Ĵ��������Ϊ��������=x- A0����
��������ָ�������뱻����X�ٷֱȡ���ʵ��������������������ֱ�ʾ��ʽ��ʵ����������ָ�������뱻������Լ����ֵ��ʵ��ֵ��X0֮��(��A=��/ X0×100%)��������������ָ���������DZ�����ֵ��ʾֵ��X֮�ȣ���x=��/ X×100%����
���������ָ�������������Χ����ֵ�����̻���������̶�B֮��(��m=��/B×100%)��
1.2 ʲô�Dz�������������м��ֱ�ʾ����������ͨ��Ӧ����ʲô���ϣ�
���������ָ������������ֵ֮����ڵIJ��졣��������о��������������������ֱ�ʾ�������������ͨ�����ڶԵ�һ����ĵ�һ�������Ķ�β���������������ͨ�����ڲ�ͬ�����ͬһ�������ıȽϷ�����������������þ����DZ�������
1��3 �ò�����ΧΪ-50����150kPa��ѹ������������140kPaѹ��ʱ�����������ʾֵΪ142kPa,���ʾֵ�ľ�����ʵ���������������
��=142-140=2kPa; ��A=2/140=1.43%;��x=2/142=1.41%;��m=2/(50+150)=1%
1.7 ʲô��ֱ�Ӳ�������Ӳ�������ϲ�����
ͨ�������DZ��ѱ궨�ã�������ij��δ֪�����в���ʱ������ֱ�Ӷ�������ֵ��Ϊֱ�Ӳ���������ȷ���������ĺ�����ϵʽ��Ȼ���ñ궨�õ���������������ϵʽ�е��й����������뺯��ʽ�н��м���õ�����������Ϊ��ֱ�Ӳ�������һ�����������м���ֱ�Ӳ������м�Ӳ�����Ϊ��ϲ�����
1.9 ʲô�Dz�����ȷ���ȣ����ļ�������������
������ȷ���ȣ����������ظ��豻������ֵ�ķ�ɢ��������������ϵ�IJ�����
ͨ���������������֣�A���B������������
��ȷ���ȵ�A���������öԹ۲��н���ͳ�Ʒ����ķ�����������ȷ���ȡ�
��ȷ���ȵ�B���������ò�ͬ�ڶԹ۲��н���ͳ�Ʒ����ķ�����������ȷ���ȡ�
1.10�춨һ�龫��Ϊ1.0��100mA�ĵ�������������������50mA��Ϊ1.4mA,���ж��ñ��Ƿ�ϸ���ʵ�ʵľ��ȵȼ��Ƕ��٣�
�⣺��m=1.4/100=1.4%,��ʵ�ʵľ���Ϊ1.5,���ڱ�ƾ��ȵȼ����Բ��ϸ�
1��11ij����Ԫ�����װ壩����ֱ��d20�ߴ����15�β����������������£���λ��mm��:
120.42 ,120.43,120.40,120.42,120,43,120.39,120.30,120.40,120.43,120.41,120.43,120.42,120.39,120.39,120.40�Լ���������ִ�����д�����������
�⣺������������ҵ�����ƽ��ֵ��
X ?=120.40mm
���ݱ�������ʽ���������
?=����vi2/(15-1)��1/2=0.0289
3 ?=0.0868
���ԣ�120.30�ǻ�ֵ�����ڴִ���
ȥ����ֵ��X ?=120.41mm�� ?=����vi2/(14-1)��1/2=0.011 3 ?=0.033
����ֵ
�������ƽ��ֵ�ı�ƫ��?x= ?/(n)1/2=0.011/3.87=0.003
����������Pc=0.95,Kt=2.33��
120.41±Kt?x=120.41±0.01mm
2.3 ʲô���ȵ�ЧӦ���ȵ������ļ�������ɵģ��ȵ�ż�����ȵ��Ƶı�Ҫ������ʲô��
�����ֲ�ͬ��������ɵıպϻ�·�У������Ӵ����¶Ȳ�ͬʱ����·�о�Ҫ�����ȵ��ƣ��������������Ϊ�ȵ�ЧӦ���ȵ����ɽӴ����ƺ��²������������ɡ��ȵ�ż�����ȵ��Ƶı�Ҫ�����ǣ����ֲ�ͬ�����������˵��¶Ȳ�ͬ��
2.5ʲô���ȵ�ż���м��¶ȶ��ɡ�˵���ö������ȵ�żʵ�ʲ����е����塣
�ȵ�ż�ڽӵ��¶�ΪT��T0ʱ���ȵ��Ƶ��ڸ��ȵ�ż�ڽӵ��¶�ΪT,Tn��Tn��T0ʱ��Ӧ���ȵ��ƵĴ����͡�
EAB(T��T0)= EAB(T��Tn)+ EAB(Tn��T0)������Ҫ��������¶Ȳ�����
2.9�ȵ�ż�IJ������ߵ�������ʲô��ѡ��ʹ�ò������ߵ�ԭ����ʲô��
�������ߵ������ǽ��ȵ�żԭ������ӵ��Ƶ�һ���µ�λ�ã�����������������¶Ȳ������á�
ʹ�ò������ߵ�ԭ��������˿��ܱ仯���¶ȷ�Χ�ڣ�0~100�棩���������ߵ��ȵ������빤�����ȵ�ż��ͬ��
2.20ij�ȵ�ż������Ϊ0.04mv/�棬���������¶�Ϊ1200��Ļ���������ָʾ�����¶�Ϊ50��Ϊ��ˣ������ȵ��ƵĴ�С��
ָʾ���ȵ��ƣ���1200-50��×0.04=46mV;
2.23��֪�������¶ȼƣ�0��ʱ����Ϊ100����100��ʱ����Ϊ139�����������Ƚ��ʽӴ�ʱ������ֵ����281������ȷ���ý����¶ȡ�
�⣺�Ѳ�������¶���Ӧ���Կ�Ϊ�����У���139-100��/��100-0��=��281-100��/(t-0) ��t=464.1��
2.31��һ֧������0.08mV/����ȵ�ż���ѹ����������ѹ�����߶˴��¶�Ϊ50�档��ѹ���ϵĶ���Ϊ60mV,���ȵ�ż�ȶ��¶ȣ�
�⣺��EAB(T��T0)= EAB(T��Tn)+ EAB(Tn��T0 )��60/0.08+50=800��
3.1ʲô��Ӧ��ЧӦ������Ӧ��ЧӦ���ͽ�������Ӧ��Ƭ�Ĺ���ԭ����
һ���ܽ��Լ��ϵ�Ӧ��仯ת��Ϊ����仯�����������ΪӦ��ЧӦ���ڲ���ʱ������������Ӧ��Ƭ�ι�ճ���ڱ����Լ��ı����ϣ������Լ��������Σ�Ӧ��Ƭ������դҲ���ͬ���ı��Σ��Ӷ�ʹ�������֮�����仯���˵���仯�����Լ�Ӧ��ɱ����ģ������Ϳ��Է�ӳ������������Ĵ�С��
3.3�ȽϽ���Ӧ��Ƭ�Ͱ뵼��Ӧ��Ƭ����ͬ��Ͳ�ͬ�㡣
����˿Ӧ��Ƭ��뵼��Ӧ��Ƭ����ͬ�㣺�������ڵ���Ӧ��Ƭ������Ӧ��仯ת��Ϊ����仯�Ĵ���Ԫ����
����˿Ӧ��Ƭ��뵼��Ӧ��Ƭ�IJ�ͬ�㣺����Ӧ��Ƭ���������κ�ı���ǻ�е���γߴ磬�Ӷ��������ı仯�����뵼��Ӧ��Ƭ�������κ�ı��Ӧ��Ƭ�ĵ����ʡ�
3.5 ��������Ӧ��Ƭ��������ϵ��K��ͬ��������ϵ�Ӧ��������Ko�Ƿ���ͬ��Ϊʲô��
����ͬ����������Ӧ��Ƭ���ö�·�ķ�����������ЧӦ��Ӱ�졣
3.14 һӦ��ʽ��ǿ����������������ͼ3.14ͼ��ʾ�������������������ϵ����Ӧ��Ƭ�еĵ���������ϵ����ȣ�R1=R2��
��1����������˫�۵�·ͼ��
��2����֤���ô����������¶Ȳ������ܣ�
��3��������������h=0.5mm,����l=15mm,�̶��˿���bo=18mm,���ϵĵ���ģ��E=2×105N/m2, �乩���ѹU=2V�������ѹUo=1mV,K=2ʱ������������
�⣺��3����˫��Ӧ��Ƭ���ŵã�Uo=2UK��/4, ��=2Uo/UK
���ɵ�ǿ������������Ԫ����Ӧ�乫ʽ��=6Fl/(boh2E)��F=��boh2E/(6l)
����������ʽ�ȵ���F=Uoboh2E/(3lUK)=0.001*0.018*0.5*0.5*2×105/(3*0.015*2*2)=5N
3.16 �����100���ĵ���Ӧ��Ƭ���ڵ����Լ��ϣ����Լ�����������S=0.5×10-4 m2,����ģ��E=2×1011N/m2������F=5×104 N����������Ӧ�����1��������Ӧ��Ƭ��������ϵ����
�⣺�ɺ��˶��ɦ�=E��,���ɦ�=F/S,��R/R=K��.��K=��RES/(RF)=1*2×1011*0.5×10-4/(100*5×104)=2
3.20�Բ�������������������Ĵ�������ͼ3.20ͼ��ʾ��R1,R2,R3,R4��Ҫ�����ڵ��������ϡ���֪��������������Ϊ0.00196m²,����ģ��E=2×1011N/m2�����ɱ�µ=0.3,��R1=R2=R3=R4=120��K=2,����ɵ�ȫ���͵�·��ͼ3.20ͼ��ʾ�����ŵ�ѹU=2V���ֲ�������ѹUo=2.6mV����
��1���Ƚ����������Ӧ�估����Ӧ��Ϊ���٣�
��2������FΪ���٣�
�⣺��1������Ӧ��Ƭ���ȫ�š���������Uo=E(��R1-��R2+��R3-��R4)/4R=EK(��1-��2+��3-��4)/4
Ӧ��Ƭ1��3���ܵ�����Ӧ�䣬����1=��3=�ţ�Ӧ��Ƭ2��4���ܵĺ���Ӧ�䣬����2=��4=��r,������ʽ�õ���
Uo=UK(��-��r)/2=UK(��+µ��)/2= UK��(1+µ)/2
2.6×10-3=2*2*��*(1+0.3)/2 ������Ӧ���=10-3������Ӧ�䣺��r=-µ��=-3×10-4
��2���ɺ��˶��ɵ�F=��SE=10-3×0.00196×2×1011=3.92×105 N
4.1��Ϊ���ʽ�����������ʽ���������ļ��ࣿ����ʲô�ص㣿
���õ�Ÿ�Ӧԭ��������ǵ���ת������Ȧ�Ը�ϵ��L��ϵ��M �ı仯�����ɲ�����·ת��Ϊ��ѹ������ı仯�����������װ�ó�Ϊ���ʽ��������
���ʽ��������Ҫ��Ϊ�Ը�ʽ������ʽ��������ʽ���֡�
�Ը�ʽ���������øı��·�еĴ��裨��Ъ���Ӷ��ı��Ը�ϵ�������ִ������Ľṹ�����������ȵͣ����Է�ΧС���������ޣ�
����ʽ�������Ľṹ��ͬ��ѹ�������÷ǵ����ı以��ϵ���ﵽ����Ŀ�ģ����ִ����������Ƚϸߣ�����·�Ƚϼ���������������
����������������������ЧӦ�����ǵ����ģ��ṹ��������Ƚϸߣ����ԶȽϺã��ɱ��ϵͣ�Ӧ�÷�Χ�Ϲ㡣
4.8���ѹ��ʽ���������������ѹ������ԭ����ʲô���������ٺ�������Ӱ�죿
���������ڲ��ѹ�����м�λ��ʱ�����Է��֣�������������������λ�þ���ʹ����ת����·���Ϊ�㣬����һ����С�������ѹ���ڣ���������������㸽��ʱ���ڵ�С����ѹ��Ϊ�������ѹ��
������ԭ������У���1��������Ȧ�ĵ������������γߴ���·��������ȫ�Գơ�
��2�����ڼ�������������Ȧ��ļ������ݣ���������Ǽ�ķֲ����ݡ�
��3����Դ��ѹ���иߴκ�г������4����·�ĴŻ����ߴ��ڷ����Եȡ�
�����������ѹ�ķ�������1����߿�ܺ���Ȧ�ĶԳ��ԣ���2�����ٵ�Դ�е�г���ɷ֣�
��3����ȷѡ���·���ϣ�ͬʱ�ʵ���С��Ȧ�ļ���������ʹ��о�����ڴŻ����ߵ�����ȥ��
��4������Ȧ�ϲ��������������磬������λ��
��5�����������첨��·��
4.12һ�������廷�δ�о��ƽ������Ϊ12cm�������1.5cm2,ƽ����Դŵ���µr=2000,��մŵ���µ0=4��×10-7H/m,��
(1)�������������500��ʱ���ֵ�Ƕ��٣�
(2)��������һ��ʱ���ֵ�Ƕ��٣�
�⣺��L=�ا�/I, ��=I��/Rm,Rm=l/µS�õ�
L=��2µS/l=5002×20##×4��×10-7×1.5×10-4/12×10-2=��/4��
L���2�����ȣ�����������һ�����ֵ�ǦС�
4.17��֪����϶��д���������о���S=1.5cm2����·����L=20cm����Դŵ���µ1=5000,��϶��0=0.5cm������=±0.1mm,��մŵ���µ0=4��×10-7H/m,��Ȧ������=3000����ʽ�������������Ȧ�L/���ġ������ɲ�ṹ��ʽ���������Ƚ���α仯��
�⣺�ɦ�L/����=L0/��0, L=�ا�/I, ��=I��/Rm,Rm=l/µS�õ�
��L/����=��2µS/l��0=30002×5000×4��×10-7×1.5×10-4/(20×10-2×0.5×10-3)=8.478×104(H/m)
��ǵ��˵�2��,�������ȱ�Ϊ2×8.478×104(H/m)=1.69 ×105(H/m)
4.19��ν����ЧӦ��������������ЧӦ����λ�Ʋ�����
���ݷ����ڵ�Ÿ�Ӧԭ������״�����������ڱ仯�Ĵų��л��ڴų������и�������˶�ʱ�������ڽ�����������״�ĸ�Ӧ���������������Ϊ������ЧӦ��
���۷�����ʵ�鶼��֤����������ǿ�������x�ı仯���仯��������һ��ϵ������Ȧ-����ϵͳ�����ڱ�������ϣ��Ϳɲ������������λ�ơ�
5.1 ���ݹ���ԭ���ɽ�����ʽ��������Ϊ�������ͣ�ÿ��������ʲô�ص㣿��������ʲô���ϣ�
���ݹ���ԭ���ɽ�����ʽ��������Ϊ�伫�ࡢ������ͱ�����������͡��伫���͵��ݴ������ṹ���ɱ��͵����Է�Χխ����Ҫ����λ�Ʋ�����������͵��ݴ����������ԶȺ�,��Ҫ���ڽ�λ�ƵIJ�����������͵��ݴ������ṹ��ʽ����������������Һλ�߶ȣ�ֽ�š���Ե��Ĥ�ĺ�ȣ�Ҳ��������������ʳ����֯Ʒ��ľ�Ļ�ú�ȷǵ��������ʵ�ʪ�ȡ�
5.8��֪ƽ��ʽ���ݴ������ļ���ߴ簢a=b=4mm,����d0=0.5mm,��������Ϊ��������ô�������̬�����ȣ�����������ƽ�м���һ���ƶ�2mm,���ʱ�ĵ�������
�⣺�ɦ�C/��x=C0/a,C0=��S0/d0 �õ�
��C/��x=��b/d0=1×4/0.5=8;
�ƶ������ֵΪ��C=��S/d=��ab/d=1×2×4/0.5=16pF
5.11 ��֪������͵��ݴ�����������������Ϊ10mm, ��=50µF/m,�����弸�γߴ�һ����Ϊ30mm×20mm×5mm,�����������£����ж�������ԭλ�������ƶ���10mm������C=��K=?
�⣺C=��S/d�õ�C0=��ab/ d0=50×30×20/10=3µF
�ƶ������C��=��ab/ d=50×20×20/10=2µF(�趨����Ȳ���)
��C= C0-C��=1µF��
K=��C/ C0=1/3
6.1ʲô����ѹ��ЧӦ����ѹ��ЧӦ?
ijЩ�����ܵ��������÷����α�ʱ��������ijЩ�����ϻ���ֵ�ɣ�����ЧӦ��Ϊ��ѹ��ЧӦ��
ѹ��ЧӦ�ǿ���ģ�����������糡�����£�Ҫ�����α䣬����ЧӦ��Ϊ��ѹ��ЧӦ��
6.14 ijѹ�羧��ĵ���Ϊ1000pF,Kq=2.5C/cm,Cc=3000pF,ʾ�����������迹Ϊ1M���Ͳ�������Ϊ50pF.��
��1��ѹ�羧��ĵ�ѹ�����ȣ�
��2������ϵͳ�ĸ�Ƶ��Ӧ��
�⣺��1����Kq=q/P,Ku=Uo/P,Uo=q/Co��Ku=Kq/Co=2.5/1000=2.5×10-9 C/cm.F
��2��fH=1/(2��R(Cc+Ci+Co))=1/(2×3.14×(3000+50+1000))=3.93×107=39.3MHz
6.27��һѹ�羧�壬�����S=3cm2,���t=0.33mm,�����x��������ʯӢ����ѹ��ϵ��d11=2.31×10-12C/N�����ܵ�ѹ��p=10MPa���ò����ĵ��q�������ѹU0��
�⣺ ��q=d11·F,F=P·S�õ���q=2.31×10-12×10×106×3×10-4=6.93×10-9 C
��U0=q/C0, C0=��S/t, ��U0=qt/��S=6.93×10-9×0.33×10-3/3×10-4=7.623×10-9 V
7.1ʲô�ǹ��ЧӦ�����ܡ����������ܡ����طֱ�����������ЧӦ�����й�������Щ�������ԣ�������֤���������ѹ���ȶ��ģ�
�𣺵����ù�����ijһ����ʱ����������ܵ�һ������Ϊhf�Ĺ�������������ڲ����ӻ���������ͷų����������Ϊ���ЧӦ�����ЧӦ����Ϊ���࣬������������ЧӦ�����������������ڹ��ЧӦ�����������赲����ЧӦ��
������һ���Ĺ�����Ӧ���ԣ���������0.45~1.1um��Χ�������ڲ�ͬ�Ĺ��ն����в�ͬ�Ĺ������غͶ�·��������·�������ն��бȽϺõ����ԣ��������������ն�Ϊ�����ԡ����ն�Ϊһ��ֵ�������ڱ����ˡ���ˣ�������һ���Կ�֪��ֻҪ��֤�㹻�Ĺ��նȣ����������ѹ���ȶ��ġ�
7.14ʲô�ǹ������˴���������ʲô�Ƿǹ������˴�����?��ֱ����˵��
�𣺹������˴����������ö������Ϣ�������������ͼ��ܵĹ��ˣ����ɡ������͡��С���Ϊһ��Ĵ����������磺����λ�ƴ�������
�ǹ������˴������������ڹ��˵Ķ���������������м���ù�ѧ���ϼ���еʽ���ѧʽ������Ԫ���������������ı仯���ǹ������˴������У����˲�������Ԫ������ֻ�����������С������磺˫���������¶ȴ�������
8.17ʲô�ǻ���ЧӦ���������ƵĴ�С����Щ���ؾ�����
��һ��ͨ�е���I�ĵ��屡Ƭ���ڴŸ�Ӧǿ��ΪB�Ĵų��У�B�ķ���ֱ��I�����ڴ�ֱ�ڵ����ʹų��ı�Ƭ���࣬����һ�������ڵ����ʹų�Ӧǿ�ȵĵ��ƣ���һ���������Ϊ����ЧӦ������������ų�ǿ�Ⱥ͵���ǿ�ȳ����ȣ�UH=KHIB����
8.19ʲô�ǻ���Ԫ���IJ���λ���ƣ���ν��в�����
�𣺸���UH=KHIB��֪����B=0, UH=0��Ȼ�����ڹ���ȱ�ݺͲ��Ϲ������Ե���UH��Ϊ�㡣����ǻ���Ԫ���IJ���λ���ơ����Բ��õ���ƫ�ò�����ų�ƫ�ò�����
8.27 ��֪ij����Ԫ���ߴ�Ϊ��L=10mm,��b=3.5mm,��d=1mm���ط���ͨ��I=1.0mA,�ڴ�ֱ��b×d���������ϼӾ��ȴų�B=0.3T,�����������UH=6.55mV����û���Ԫ����������ϵ��KH��������Ũ��n�Ƕ��٣�
�⣺��UH=KHIB��KH=UH/IB=6.55/1×0.3=21.83V/AT
����KH=-1/ned��n=-1/KHed=-1/21.83×1.602×10-19×1×10-3=-2.86×1020
������ҵ��
1�� �ڹ�ҵ�����У������ȵ��贫���������������Ƽ���·���Ի����õ�·��������·�Ĺ���ԭ������ȱ�㡣
�ȵ��贫�����ڹ�ҵ������ʹ�ã�����ͨ���Ƚϳ������ߵĵ����������ŵIJ�ƽ�⣬ͬʱ���������������·�У���˲������������ӷ��ͱ�֤���ߵ������ؽ�����ŵ�·����֤���ŵ�ƽ�⣬���˷��������ƵĿɵ�����Ĵ���Ӵ��������µĵ������仯ȱ�㡣
2�� ������ͼ��Ӧ����ʲô���͵���������Rt���������ܻ����¶ȱ仯��Ӱ��.
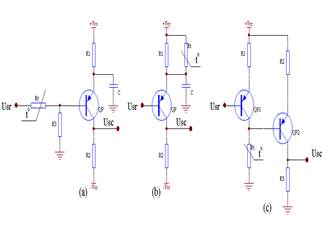
��a��NTC (B) PTC (C) PTC
3�� �����ʽ���ݴ�������˫T���ż���·��
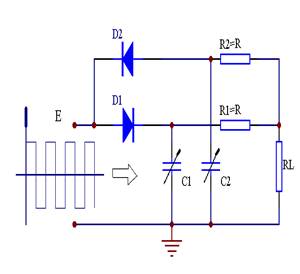
��·�Ĺ���ԭ�����£�
��ѹEΪ�����ܣ�D1��ͨ��D2��ֹ����ʱ����C1Ѹ�ٱ������E����������I1�����ͬʱ������C2��RL��R2�ŵ磨ǰ�������Ѿ�D2��磩���ŵ����ΪI2(t)������RL�ĵ���ΪIL(t)=I1-I2(t)��
��ԴEΪ�����ܣ�D1��ֹ��D2��ͨ����ʱ����C2Ѹ�ٱ������E��E��������I��2��������C1��RL��R1�ŵ磬����ΪI1(t)������RL�ĵ���ΪI��L(t)=I��2-I1(t)��
��������D1��D2��������ͬ��R1=R2=R���Ҳ��������C1=C2����������λ������RL�ĵ���IL(t)��I��L(t)��ƽ��ֵ��ȣ������෴�����RL�����ź��������C1��C2�ı�ʱ��IL(t)��I��L(t)��������ź������Usc��0��
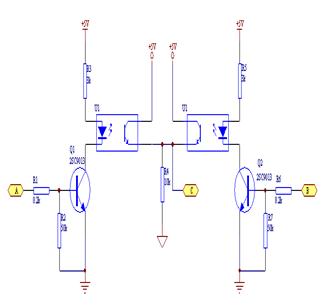
4�� ��ͼΪ�Ը�ʽ����������õ������첨�ĵ��ŵ�·�������õ�·�Ĺ���ԭ����

����ԭ�����£�
�����������м�λ��ʱ����dx=0����Z1=Z2=Z0������i1,i2���δ�С��ȷ����෴����Usc=i1R1-i2R2=0��
������ƫ���м�λ�ã�������+dx����Z1=Z0-dZ��Z2=Z0+dZ,���ڵ�Դ�������ڣ�i1����-i2 ��С���ڵ�Դ�ĸ������ڣ�-i1 ��С��i2����Ӧ�������ѹUsc=i1R1-i2R2,�ڵ�Դ�����������ھ�Ϊ�϶ˡ�+�����¶ˡ�������
ͬ���������������ƶ�-dx����Z1=Z0+dZ��Z2=Z0-dZ,��Ӧ�ڵ�Դ���������ܣ������ѹUsc��Ϊ�϶ˡ��������¶ˡ�+����
5�� ���ù����������C=A and B��C=A or B ���������·��
��1��C= A and B
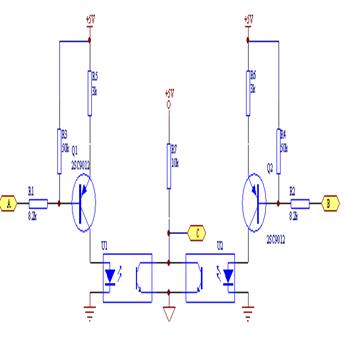
��2��C=A orB
һ�����
1�����ܻ��DZ����õ�ͳһ��ֱ���ź�Ϊ 0~10 mA�� 4~20 mA. (P5)
2������Ϊ1V�ĺ�������G=5.0.�����max= 50mv (P15)
3�����̲����У�������̬�ֲ���������ƣ� = 0 (P18)
= 0 (P18)
4����������ѹ��ֵΪ1.98mv������ֵΪ2.00mv�����������= 0.02 mv������ֵC= ��0.02 mv (P14)
5������Ԫ�������������Ӵų��ľ���ֵ���Ӷ� ���� �����ӻ���٣� ��P110��
6�������˲������ܶ࣬��λֵ���� ������� ���źž������õ��˳����á� ��P199��
7������32·Ѳ�ؼ��ϵͳ��Ҫ��ÿ�������źż��500��/s����������ʱ��Ϊ 0.063ms ��P193��
8������NTC�������裬�������¶�֮��Ĺ�ϵʽΪ RT=AeB/T (P40)
����������
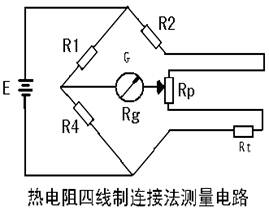
1�������ȵ�ż���ȵ���������¶����߶����ٵ��ص㣬�����ȵ�ż��·�д��벻ƽ����Ž��в�������ͼ����������ԭ����(P102)
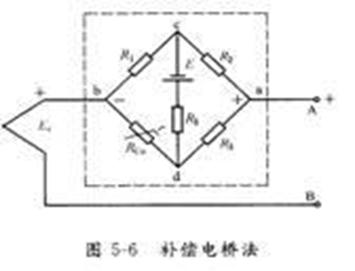
ͼ�������ű�R1=R2=R3=1�������¶�ϵ��С����ͭ˿���Ƶĵ��裬��һ�ű�Rcu��ͭ�������ƵIJ������裬��·��ԴE=4V��������·�������ȵ�ż�����ͬ�Ļ����¶��С���˲�ƽ����ŵ������ѹ�滷���¶ȵ����߶����ӣ������ӵ���ֵ���ȵ�ż���������ٵ���ֵ��ͬ���Ӷ����������á�
2��������Ÿ��ʼ��㣬˵�������������������塣 (P22)
���� ����
���� max=±�ң���Kp=1�������p=68.27%�������ʵ˵��������ijһ����������n�Σ�����Σ�����֮��żȻ������ֵ�ڡ�
max=±�ң���Kp=1�������p=68.27%�������ʵ˵��������ijһ����������n�Σ�����Σ�����֮��żȻ������ֵ�ڡ� ~ +��Χ�IJ���ֵ��68.27%����ʣ�µ�31.73%�IJ���ֵ����������ʵֵ֮�������±�ң�����Ǿ����������������塣
~ +��Χ�IJ���ֵ��68.27%����ʣ�µ�31.73%�IJ���ֵ����������ʵֵ֮�������±�ң�����Ǿ����������������塣
3����������������������Ϊ�����壬������Ƶ��������·��ͼ����������ԭ����(P60)
�⣺

��������Ȧ���L�͵���C��ɲ���г���·������ʹ��������ȦԶ�뱻�����Ϊ�����Ǵ��Բ��ϣ�����ʹг���·LC�Ĺ���Ƶ�ʵ�����������ĸ�ƵƵ��f0����ʱ�迹Z0��������ѹe=e0������������ӽ���Ȧʱ������ʹ��Ȧ�ĵ������С��ʹ����г���·�Ĺ���Ƶ����ߣ������·ʧг����Ч�迹��С�������ڻ�·�е���R��ѹ�������������������ѹ���͡�
����������Ϊ���Ų��ϣ�����ӽ���Ȧʱ����Ȧ�ĵ�Ч�������ʹг���·����Ƶ�ʼ�С����
4�����������Ŵ������̿ز����Ŵ����������DZ��еĹ��ܼ����á�(P146~P148)
�����Ŵ������˶Ե͵�ƽ�źŽ������ԷŴ��⣬���������迹ƥ��Ϳ���ģ���ŵ�����
�̿ز����Ŵ������Ը��������źŵ�ƽ�Ĵ�С���ı�����Ŵ��������棬ʹ������ͨ���������������зŴ�
����������
1��ij����ϵͳ�ɴ��������Ŵ����ͼ�¼����ɣ������ڵ������ȷֱ�Ϊk1=0.4mv/mm, k2=2.0v/mv, k3=2.5mm/v����ϵͳ�ܵ������ȡ���P11��
�⣺K=k1×k2×k3=0.4mv/mm×2.0v/mv×2.5mm/v=2
2��ij�������Ϊ100mA������0.5������Ϊ0~300mA��1.5������Ϊ0~100mA�ĵ�������������������㣬�Ƚ��ĸ������������Ϻã���˵����������ѡ���DZ���
�⣺��Ϊ ������
������ ��
�� ��X0=100mA����Ϊ
��X0=100mA����Ϊ =
= ������
������ 1=2.���ڴ������Ϊ100mA�����ʹ������Ϊ100mA�ĵ��������׳����̶�������������Ӧѡ������Ϊ300mA�ĵ�������
1=2.���ڴ������Ϊ100mA�����ʹ������Ϊ100mA�ĵ��������׳����̶�������������Ӧѡ������Ϊ300mA�ĵ�������
��ʵ��ʹ������Ϊ����������ֵ�Dz�֪���ģ�������������㣬����ʹ���DZ�����ʱ��һ�㲻�˲�����С�������������ڽӽ���������
3����1�����������DZ�ϵͳ��д��������ȱ任��ʽ����P201��
��2��һ�ȵ����ϵͳ�����ԣ���������Ϊ300~900����ijһʱ���ͻ���������8λA./Dת����������ΪCDH�����ʱ���¶�Ϊ���٣������������Q0=0ʱ��N0=0������Qm=600����ӦNm=FFH�����ʱ������Ϊ��� (P202)
�⣺��1��������ȱ任��ʽ
��2��

4����1�����ȵ����У������м䵼�嶨���Ƴ����缫���� (P97~P98)
��2����֪E����������100,0��=2.4mv��E���衪����100,0��=1.7mv����E������������100,0��
�⣺��1���м䵼�嶨�������ȵ�ż��·�У�ֻҪ�����м䵼�������¶���ͬ��������м䵼����ȵ�ż��·�����ȵ���û��Ӱ�졣���м䵼��Ϊ���缫ʱ����Ϊ�������¶���ͬ�������ȵ�ż��·�����ȵ��Ʋ��䡣
��2��E������������100,0��= E����������100,0����E���衪����100,0��=2.4��1.7=0.7mv
�ġ������
����Һ��߶�Ϊh�����䣬Բ���ε��������Ŵ������ŷ�����������䡢�Ƕ�ָ���ǡ����衢��λ�Ƽ����ݵ����Һλ���װ�ã�������ָ��ǶȦ���h�Ĺ�ϵ����P76��
�⣺
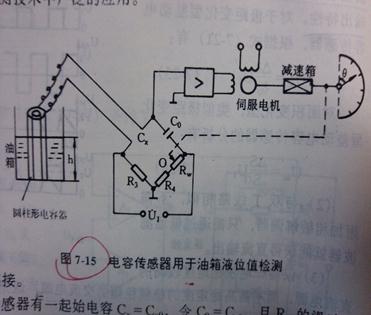
CxΪ����ʽ���������ݣ�C0Ϊ�̶��ı���������RwΪ��������ƽ��ĵ�λ����
����������ʱ������ʽ��������һ��ʼ����Cx=Cx0����C0=Cx0����Rw�Ļ�����λ����㣬��Rw=0����Ӧָ��Ҳָ����λ�ϡ��� ��ʹ���Ŵ���ƽ��״̬�����Ϊ�㣬�ŷ������ת����
��ʹ���Ŵ���ƽ��״̬�����Ϊ�㣬�ŷ������ת����
���������������ӣ�Һλ������h������Cx=Cx0+ Cx��Cx��h�����ȣ�����ʧȥƽ�⣬���������ѹ���Ŵ�������ŷ�����������ٺ�һ�������ָ��ƫת�Ƚǣ���ָʾ�������Ķ��٣���һ�����ƶ�Rw��ʹ�������»ָ�ƽ�⡣Rw��h�����ȡ���Ϊָ�����λ�ƻ�����ͬ�����ӣ�����Rw�ͦȽdz����ȡ����Ԧ���h�����Թ�ϵ����Ϊ���Դӿ̶����϶�����λ�߶�h��