ʵ�����ƣ������취�����˿�����ϵ���ģ��
һ��ʵ��Ŀ��
ѧϰ�����취�ⶨ��˿������ģ�������չ�ܸ˷�����С�仯����ԭ����ѧϰ�����������ݡ�
����ʵ��ԭ��
��Ϊ �������Ϊ
�������Ϊ �Ľ���˿��������
�Ľ���˿�������� ���������쳤��
���������쳤�� ,��
,�� Ϊ����ģ������ͼ1�������˿ֱ��Ϊ
Ϊ����ģ������ͼ1�������˿ֱ��Ϊ ���������
��������� ,��
,�� ��
��
�쳤���Ƚ�С���ײ�����ˣ����ù�ܸ˷Ŵ�ԭ�������װ��ȥ���쳤������ͼ2����
�ɼ��ι�ѧ��ԭ����֪�� ��
��  ��
��

ͼ1 ͼ2
������Ҫ�����豸
����ģ���ⶨ�ǣ���ܸˣ���Զ����ֱ�ߣ�ǧ�ֿ����α꿨�ߣ��׳ߣ������˿�����룻ˮ���ȡ�
�ģ�ʵ�鲽��
1. ��������ģ���ⶨ��
2��������˿ֱ��
3��������ܸ˹�ѧϵͳ
4��������˿���ɺ���쳤��
(1) ��������Ԥ��2�����롣��¼��ʱ��Զ��ʮ�ֲ�˿ˮƽ�߶���ߵĿ̶�ֵ ��
��
(2) ��������1�����룬��¼��Ӧ����Զ������ ��
��
(3) �ټ�1�����룬�����ض��������ȶ������ȡ�����룬��¼��Ӧ����Զ������ ��
��
(4) ����ͬһ���������α�߶���( ��
�� )��ƽ��ֵ
)��ƽ��ֵ ��
��
(5) �ø��������� ��
��
5. �ø־��ߵ��β�����ߵ�ƽ�澵���� ��˿���ȣ���ѹ��ӡ�����β�����ܸ˺��㵽��ǰ������ߵĴ�ֱ����
��˿���ȣ���ѹ��ӡ�����β�����ܸ˺��㵽��ǰ������ߵĴ�ֱ���� ��
��
6���������ݷ����Ͳ�ȷ������������������ģ��ֵ��
�壮���ݼ�¼������
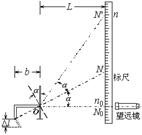
1����β�����˿ֱ��
��1 ��ǧ�ֿ�������˿ֱ�����������ȡ0.004 ����
����

��˿ֱ���ģ�
A�ȷ����
 0.0024 mm
0.0024 mm
B�ȷ���� mm
mm
�ܲ�ȷ���� 0.0034 mm
0.0034 mm
��Բ�ȷ����  0.48%
0.48%
������� 
2�����β��������׳ߵ��β�����˿����ƽ�澵����������α꿨�߲�����ܸ˳�
����ȡ��С�̶���Ϊ���������β�����B�ȷ���ȵ����ܲ�ȷ���ȴ�����
��2 ��˿����ƽ�澵�������������ܸ˳� ��λ��

�����㷽������ȷ����=�������/ ��
��
3����ܸ˷�������˿С�쳤��
��3 ������˿��С�쳤����

��ע��Ϊ�˼�ȷ�����������������ǿ��Բ��ϸ�ذ�B�ȷ���ȵ����ܲ�ȷ���ȣ����Ұѱ����С�̶ȵ�1/5���������������� ��
��
4����������ģ�������в�ȷ��������
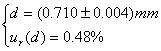
�ɱ�1����2����3�������ݴ��빫ʽ �ɵø�˿������ģ���ģ�
�ɵø�˿������ģ���ģ�
����ֵ =
= (N/m2)
(N/m2)
��Բ�ȷ���� 


�ܲ�ȷ���� 
 (N/m2)
(N/m2)
�������
�ڶ�ƪ�����취�ⵯ��ģ�� ʵ�鱨��
����������ѧ

��ѧ����ʵ������
Ժ��ϵ�� ����ѧԺ רҵ �������� �༶ 0705
�� �� ͯ��� ѧ�� 200767025 ʵ��̨��
ʵ��ʱ�� 2008 �� 11 �� 11 �գ���12�ܣ����� �� �� 5-6 ��
ʵ������ ���취�ⵯ��ģ��
��ʦ����
ʵ��Ŀ����Ҫ��
1. �����취�ⶨ����˿�ĵ���ģ����
2. ���չ�ܸ˾��߷��ⶨ����С�仯��ԭ���ͷ�����
3. ѧ�ᴦ��ʵ�����ݵ���С���˷���
��Ҫ�����豸��
����ģ�������ǣ�������˿��ƽ�澵��ֱ�ߺ���Զ������ɵĹ�ܸ�װ�ã��� �׳ߣ� ��������
ʵ��ԭ�������ݣ�
1. ����ģ��
һ��ϸ���ȵĽ���˿�� ����Ϊl�� �����ΪS�� һ�˹̶�����ֱ���ң� �¶˹�������Ϊm�����룻 �����˿������F=mg���������쳤��l�� ��λ����������ܵ�������F/S��ΪӦ���� ��λ���ȵ��쳤�� ��l/l��ΪӦ�䡣
�к��˶��ɳ�����������ĵ����α䷶Χ�ڣ�Ӧ��F/S����l/lӦ������ȣ� ��

���еı���ϵ��

��Ϊ�ò��ϵĵ���ģ����
���ʣ� ����ģ��E������F������ij���l�Լ������S�أ� ֻ�����ڽ���˿�IJ��ϡ�
ʵ���вⶨE�� ֻ����F��S��l�� ���ɣ� ǰ���߿����ó��÷�����ã� ������������С�� ��ʹ�ù�ܸ˾��߷������нϾ�ȷ�IJ�����
���ɣ� ǰ���߿����ó��÷�����ã� ������������С�� ��ʹ�ù�ܸ˾��߷������нϾ�ȷ�IJ�����
2. ��ܸ�ԭ��
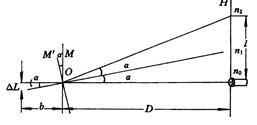 ��ܸ˵Ĺ���ԭ�����£� ��ʼ״̬�£� ƽ�澵Ϊ��ֱ״̬�� ��ʱ��߶���Ϊn0�� ������˿�������Ժ� ����ƽ�澵��תһ�ǶȦ��� ��ͼ����ʾM��λ�ã� ��ʱ���ñ�߶���Ϊn1�� �õ��̶ȱ仯Ϊ
��ܸ˵Ĺ���ԭ�����£� ��ʼ״̬�£� ƽ�澵Ϊ��ֱ״̬�� ��ʱ��߶���Ϊn0�� ������˿�������Ժ� ����ƽ�澵��תһ�ǶȦ��� ��ͼ����ʾM��λ�ã� ��ʱ���ñ�߶���Ϊn1�� �õ��̶ȱ仯Ϊ �� ��n�������ȹ�ϵ�� �Ҹ���С�����Լ�ͼ�е����Ƽ��ι�ϵ�� ���Եõ�
�� ��n�������ȹ�ϵ�� �Ҹ���С�����Լ�ͼ�е����Ƽ��ι�ϵ�� ���Եõ�
 ��b��Ϊ��ܸ˳�����
��b��Ϊ��ܸ˳�����
�����Ϲ�ϵ�� �ͽ���˿��������㹫ʽ���뵯��ģ���ļ��㹫ʽ�� ���Եõ�

��ʽ��B�ȿ������׳߲����� Ҳ��������Զ�����Ӿ�˿�ͱ��Ӳ����� ���ߵ�ԭ������¼����
������ʽת���� ������˿����Fiʱ�� ��Ӧ��߶���Ϊni�� ����
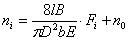
�ɼ�F��n�����Թ�ϵ�� �����������ݺ� ���Իع�õ���б�ʣ� ���ɼ��������ģ��E��
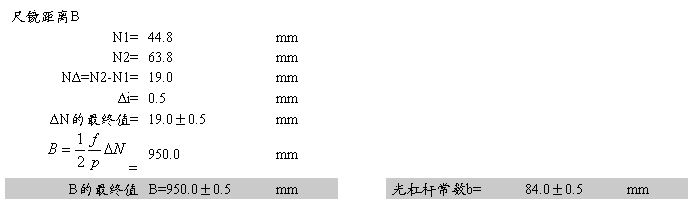
P.S. ����Զ���ͱ�߲������B��
��֪���� �ֻ����Ӿ�˿���p�� ��Զ������f��ת�᳣����
����Զ����һ���Ӿ�˿��������ϵ���������N1��N2�� ������Ϊ��N�� �ڼ��ι�ϵ�Ϻ������������������ ���Եõ�
 �� ����������ϵ�ϣ� ��x=2B�� ��
�� ����������ϵ�ϣ� ��x=2B�� �� �� ��
�� �� ����
����
���Ͽ��Եõ�ƽ�澵����ߵľ���B��
���������������
1. ��װ������ʵ������
����ƽ�澵�İ���λ�ú����Ƕ���ȷ�����ܹ����������� ������Զ����δ֪�� ʹ�������ƽ�澵�����ķ���ͬ����ʹ��Զ���Ϸ������š��Ǽ�ƽ�澵λ��ͬһֱ���ϡ�
���ڱ�ߣ� ʹ�䴦����ֱλ�á�
ͨ����Զ�������ź���ֱ�ӹ۲�ƽ�澵�� �����Ƿ�μ���ߵ�����ȷ����Զ����ƽ�澵��ֱ��ϵ�� �Ա�֤ʵ���ܹ�˳�����С�
������Զ���� ʹ���ܹ�����ʮ�ֲ�˿��ƽ�澵��������ı�ߵ��� ͬʱע�������Ӳ
2. ����
����ģ�������ǣ� �ڽ���˿�ϼ���������ͨ����ʾ��������
�������ﵽ10.00kgʱ�� ������Զ���б�ߵĿ̶�ֵn1�� Ȼ����ÿ��1.00kg������������¼���ݣ� ֱ��25.00kgֹ��
�øֳߵ��β�����˿���¼�ͷ֮��ľ���õ���˿����l��
�ÿ��߲�������ֱ�ӻ�ù�ܸ˳���b��
����Զ���IJ��˿�ͱ��ֵ�� ��Ϲ�ʽ������߾�����B��
�����������ڲ�ͬλ�ò�����˿ֱ��8�Σ�ע���������������������
���ݼ�¼�봦����
������ʵ���в�õ�ԭʼ���ݣ�
1. ��˿�ij��� L=401.2 mm
2. ��˿��ֱ��

�������������������Ư��ֵ ��=-0.01mm �Ѱ�����
3. ����Զ����õIJ�˿���� N1=44.8mm N2=63.8mm
4. ��ܸ˳�����ʵ���Ҹ�����b=��84.0±0.5��mm
5. ��˿�������� ����Ӧ�ı�߿̶�
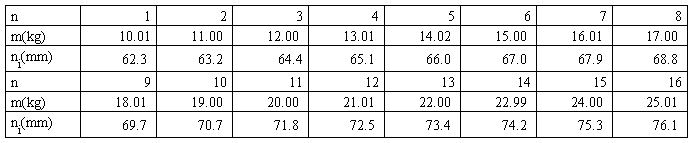
δ��������ʱ�� ��߶���Ϊ n0=53.4mm
����������
��˿���Ȳ���ֵ�IJ�ȷ����Ϊ ��i=0.5mm, ��˿����Ϊ l=401.2±0.5mm


�������������ݺ���Ӧ�ı�߶���ת��Ϊ F��NΪ��λ�� ni��mΪ��λ�� �õ�����

���ϱ����ݽ��� ������ ʹ��MLS
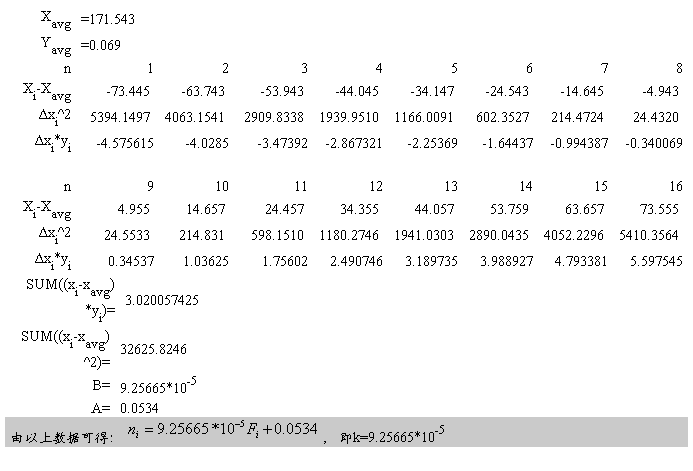
F��ni�Ĺ�ϵͼ������˷����Իع�����ͼ��ʾ��

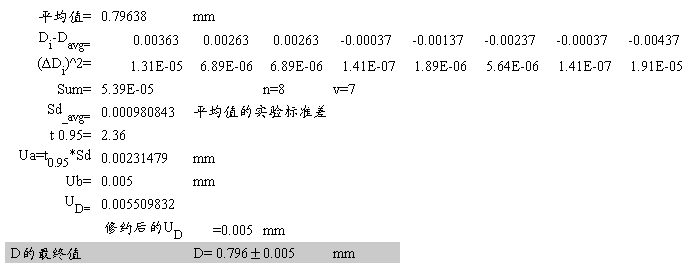
��������й����ݣ� ���Եõ�

�������E����ز�ȷ���ȣ�
�������ֵ���䲻ȷ�������£�

����֪
���������֪���ݣ� ���Եõ�UE=2751552554.69�� ��Լ��ΪUE=3*109
�õ�E�����ս��Ϊ E= (1.97±0.03)*1011Pa
���ۡ����������ɣ�
1. ��ܸ˵IJ���ԭ��Ϊ�����������ʵ���ϣ� ���Թ�·����ԭ���� �����ϵ��������������ʡ� �����ù����ֱ���ԡ������ԣ� ʹ����ͨ����Զ���۲�ı�߶��������ȣ����˿���ͱ����� �ڼ�����ͨ�����������εĹ�ϵ��ϵ������ ����ͨ��ƽ�澵�ķ������ʣ� ���ٴν��ͱ�����֮ǰ�Ļ����ϷŴ��������� �����Ŵ�С�仯���Ľ���� �Ŵ������ܸ˳���b�� �߾�����B�йأ�������Ϊ�������߱���B/b�����ȹ�ϵ���� ��ϵͳ�����Ĺ�ܸ˳���b�̶�ʱ�� �ڿɶ����ķ�Χ�����ӳ߾�����B�� ��������Ŵ��ʴӶ���߳߾�������С�仯���������ȡ�
2. ��ʵ���в���һ������������Ҫ�ۺϿ��Dz����ķ���̶Ⱥ�����������ľ��̶ܳȡ� ��ƽ�������ߵĻ�����ѡ����ʵ�ʵ�������� �����ʵ���У� ��ͬ�����������ò�ͬ�IJ��������������ġ� ʵ���в����������ֵΪ��˿�ij��ȣ� ��Ϊ�ֳ����̲����� �������Ѹֳ��ص��ķ��������� �ڶ���ʱ����ɸֳ�λ�ƣ� �����������������һ�Σ� ������ɲ����ϴ���� �Ľ����������ýϴ����̵ĸֳ߽��в�����
3. ��ʵ��IJ������̲������ӣ� ���ǽ��۳߶ȵĻ�ѧ������ͬ��۵Ľ���˿�α���ϵ������ ����������ѧ���ú�����������ʵ�һ��˼�룻 ����ʵ���������õĹ�ܸ˳߾�������Ҳ�ṩ��һ��С�����ĽϾ�ȷ���������� ֵ��ѧϰ�ͽ���� ʵ���еĸ����ǣ� ����Ԥϰʵ�����ݣ� ����ʱϸ�ġ� �ȵ��� ���DZ�֤ʵ����ٳɹ���������
4. �Ա�ʵ��ĸĽ��ǣ� �ڼ��������ƺ��ϼ��Զ�ж�ص�װ�ã� �������ڲ�ע�����Ļ����������ɣ� ��������λ�����ʱ�� ������Զ�������ж�أ�������ǧ�ﶥ��ж�ؿ��أ��� �����ܹ�����ؽ�����ж�ص���С�ķ���ֵ�� �������ֶ��������ˡ�