无碳小车设计报告
小车功能设计要求
设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。给定重力势能为4焦耳(取g=10m/s2),竞赛时统一用质量为1Kg的重块(¢50×65 mm,普通碳钢)铅垂下降来获得,落差400±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。图1为小车示意图。

图1: 无碳小车示意图
要求小车行走过程中完成所有动作所需的能量均由此重力势能转换获得,不可使用任何其他的能量来源。
要求小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地。
要求小车为三轮结构,具体设计、材料选用及加工制作均由参赛学生自主完成。
竞赛小车在前行时能够自动交错绕过赛道上设置的障碍物。障碍物为直径20mm、高200mm的多个圆棒,沿直线等距离摆放。以小车前行的距离和成功绕障数量来综合评定成绩。见图2。

图2: 无碳小车在重力势能作用下自动行走示意图
(1)车架设计
减轻小车质量,在保证小车运动平稳的前提下尽可能的减小车身的重量,在4J的重力势能的前提下尽量减少损耗,让更多的能量转化为小车的动能,进而行驶更远的距离。
车架不用承受很大的里,精度要求低。考虑到重量加工成本等,车架材料选用有机玻璃制作成三角底板。
(2)原动机构
原动机构的作用是将重块的重力势能转化成小车的驱动力。就效率和简洁性来看,我选择的是轮绳。小车对原动机构还有其他的具体要求。1.驱动力适中,不至于小车转弯时速度过大倾翻,或重块晃动厉害影响行走。2.达到终点前重块竖直方向的素的尽可能小,避免对小车过大的冲击。同时使重块的动能尽可能的转化到驱动小车前进上,如果重块竖直方向的速度较大,重块本身还有较多的动能未释放,能量利用率不高。3.由于不同的场地对轮子的摩擦可能不一样,在不同的场地小车需要的动力也不一样。因此原动机构还需要根据不同的需要调整其驱动力。
基于以上分析,制作可调的输出驱动力绳轮原动机构,如下图所示。
(3)传动机构
传动机构的功能是把动力和运动传递到转向机构和驱动轮上。要使小车行驶得更远及按设计的轨道精确地行驶,传动机构必须传递效率高,传动稳定,结构简单重量轻。
齿轮具有效率高,结构紧凑,工作可靠,传动比稳定等特点。因此我采用齿轮传动。齿轮用快速成型制成空心的。在车身重量一定的前提下,通过设计绕线盘的外径d,齿轮的二级传动比i和主动轮外径D将重块落下的距离L转变为车行走的距离S:
S=L*i D/d
由摩擦理论知道摩擦力矩与正压力的关系为
M=N*u
对于相同的材料u为一定值。
而滚动摩擦阻力f=M/D,所以轮子越大小车受到的阻力越小,因此能够走的更远。
初定驱动轮的外径为300mm,
小车行走的路程为20m,
大齿轮:模数=1,齿数=45,外径47,
小齿轮:模数=1,齿数=15,外径=17,
根据上述公式可求的d=18mm,
(4)转向机构
转向机构是本小车设计的关键部分,直接决定着小车的功能。
通过分析知道原动机构需要满足以下具体要求:
转向机构也同样需要尽可能的减少摩擦耗能,结构简单,同时还需要有特殊的运动特性。能够将旋转运动转化为满足要求的来回摆动,带动转向轮左右转动从而实现拐弯避障的功能。
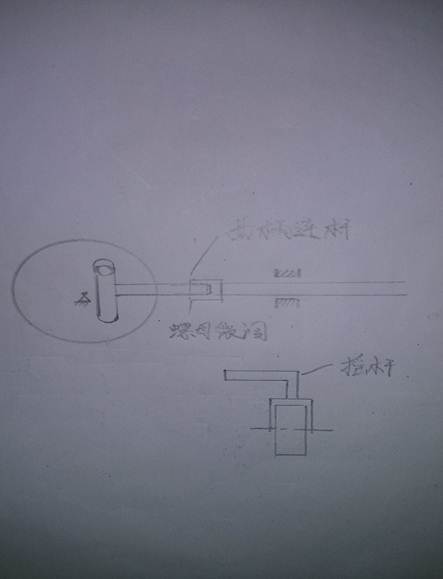
基于以上分析,我选择的转向机构为曲柄连杆+摇杆。
曲柄连杆+摇杆
优点:运动副单位面积所受压力较小,且接触便于润滑,故磨损减小,制造方便。两构件之间的接触是靠本身的几何封闭来维系的,它不像凸轮机构有时需要利用弹簧等力封闭来保持接触。
缺点:一般情况下只能近似实现给定的运动规律或运动轨迹,且设计较为复杂,当给定的运动要求较多或较复杂时,需要的构建数和运动副数往往比较多,这样就使机构结构复杂,工作效率低,不仅发生自锁的可能性增加,而且机构运动规律对制造,安装误差的敏感性增加,机构中做平面复杂运动和作往复运动的构件所生长的惯性力难以平衡,在高速时将引起较大的震动和动载荷,故连杆机构常用于速度较低的场合。
在本小车设计中由于下车转向频率和传递的力不大故机构可以做的比较轻,可以忽略惯性力,机构并不复杂,可以利用轴承大大减小摩擦损耗提高效率。对于安装误差可以用微调机构来解决。

第二篇:无碳小车具体方案设计
无碳小车具体方案设计
设计理念
1. 减轻小车质量,在保证小车运动稳定的前提下尽一切力量减小车身质量,在5J前提下理论上可以行驶更远的距离,同时速度方面也有相应的提高。减轻质量应该至少从两个方面入手:1)对于不需要的结构尽量不要,比如小车地盘我们不需要一个完整的小车地盘,甚至可以只用几根梁组合而成,这样在结构上对质量有所减轻。2)选材上,在满足刚度要求的前提下,选择密度更小的材料来制作,也能减轻车身质量。
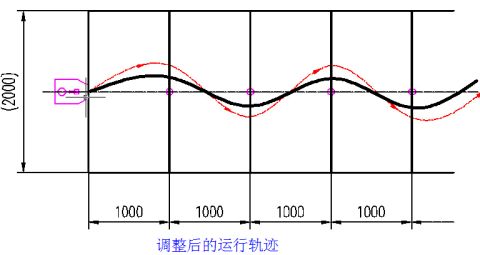
2. 对车身结构的调整,主要是车身长宽量化方面,以保证小车在前进的时候轨迹更加平滑。这样做的意义在于:1)我们可以从示意图中看出如果调整路径后更平缓,通过想同数量障碍所行路程就更短,小车就能跑得更远。2)小车转弯的角度更小,确保了小车的平稳性。实现方式:对小车运行轨迹、车身的长度、宽度量化,通过人工计算和电脑计算确定出最佳的长宽和运行轨迹。
3. 重心调制。通过在设计时候对重心的调制使小车运行平稳,转弯的时候转矩更小。该过程仍然采用量化。在实际操作中,通过调节附加重物,使小车的重心达到调节。
4. 设计可调小车。对于不同的场地环境,重有各种变量因素,通过对小车的一些主要参数采用变量控制,在实际竞赛中可以更好的适应场地,走出更好的效果。
方案设计
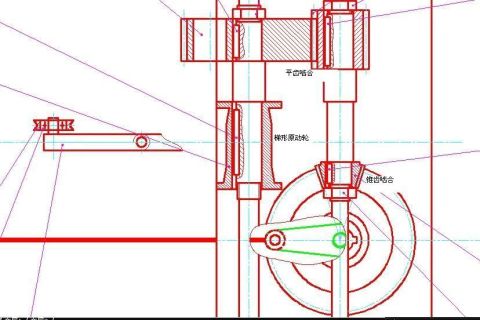
1. 能量转化装置:通过定滑轮将重物的重力势能转化为小车的动能,为了让小车运行得更稳定,我们采用小传动比,让小车的转矩刚好比摩擦力的转矩略大,使小车保持尽量低的前进速度。在低转速前进中,小车行进比较稳定,同时也减少了重物由于高速下落,最后撞击车架带来的能量损失。
在实际设计中,我们采用了i=0.4的传动比,将小车的转矩大幅度
降低,保证其低速运动。装置简图如下:
能量转化部分、梯形轮、齿轮啮合示意图
2. 小车行进轨迹
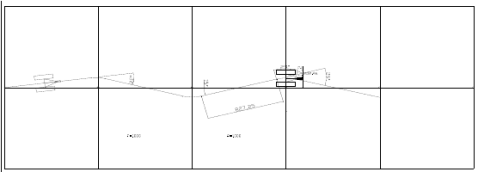
在满足小车必须每个1000mm要绕过一个障碍物的前提下,我们应该尽量减少小车的前进轨迹,因此我们认为小车行进偏离中心线越少,其轨迹越短。如下图所示:
显然我们知道,红色轨迹的行程大于黑色轨迹的行程。根据我们设计的车身宽度,以及场地限制,我们设计了如下的轨迹路线:
本方案设计小车行进轨迹
小车轨迹说明,小车在前进过程中,直接倾斜一个角度走直线,然后到达中间一个位置之后开始转弯到下一条直线如此循环。 从理论上说,这个轨迹比上面图中两个轨迹都具有优越性,因为两点之间直线距离最短,当然实际中因为偏离不远可能实际中差距不会太大。
3. 转向装置的建立
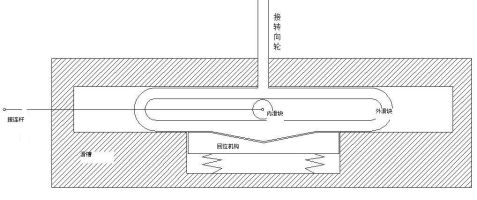
根据上面提出的轨迹理论,我们要求小车每前进2000mm为一个周期,也就是控制转向装置的机构只能旋转一周。另外我们确立了小车轮子直径为200mm。因此经过计算可得从小车驱动轴到转向轮所用曲轴的传动比为3.2857,通过一对锥齿轮啮合,将垂直于水平面的运动转到水平面上。使用曲柄滑块机构传输到位于小车头部的转向装置上。我们要求小车在行进过程中,多数时间让小车直线运动,所以我们的曲柄滑块机构传输的直线运动在一段范围内不产生作用,并要保证在这个范围内转向轮始终保持正向。于是我们设计了转向机构如下图所示:
转向机构原理图1
如上图所示,连杆拉动内滑块使滑块在外滑块里面滑动,当它和外滑块两边不接触的时候外滑块受到回位机构的控制保持在中心位置,导向轮不偏转。当内滑块接触到外滑块之后继续运动的时候,外滑块克服回味机构的阻力随内滑块一起运动,导向轮偏转,转向。
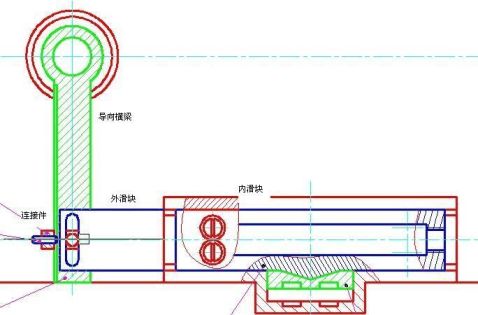
在具体设计的时候,为了更好的适应各种不同的环境,在外滑块
3
两端增设两个调节螺钉,用以调节内滑块在外滑块内的行程,以调节外滑块的行程,改变导向程度。
转向机构原理图2
外滑块的左右运动,通过连接件使导向横梁偏转,达到控制导向轮偏转。实际运用中,连接件的位置是可以改变的,也就是说改变旋转半径,改变小车转向精度。
小车前进距离估算
估算小车质量m=2kg.重物m1=1kg。滚动摩擦系数取μ=0.001。传动比i=0.4。
轮子直径D=200mm。梯形原动轮直径d=10mm。
所以重物下降h=500mm.所以原动轮绕圈数N=
轮子前进路程 l=NπDihπd=16 =25132.7mm.我们设置的轨迹每个1000mm
10001029位移路程为1029mm。因此s=l=24.3m。
我们估算的小车前进距离为24.3m.
创新性
1.
在小车的实际中,我们的转向装置跳出了传统的设计方案,即凸
4
轮或者连杆的转向方案。因为在设计中我们考虑的不仅仅是可实现,我们同时还考虑了可修改性,从上面的原来图中我们可以看出,我们在外滑槽上有两个调节螺钉调节内滑块的行程,同时在导向横梁的连接件上有锁紧螺钉,可以将连接件控制在横梁的任意位置,行程任意的转向控制半径。我们还在连杆和内滑块之间用了锁紧螺钉,使小车的导向可以纵向横调。所以我们的转向装置具有创新性和较强的环境适应性。换做凸轮是不可能具备的,一般的连杆机构又具有普遍的机会特性。所以我们认为,选用我们的转向装置是绝对优越的。
2. 在将重力势能转化为小车动能过程中,我们采用了梯形轮使能量转化过程中有更合适的转矩,并在应对有略微变化的场地时候可以做到有备无患,梯形轮图示如下:
梯形原动轮示意图
3. 在设计过程中,将轮轴的垂直转向,用锥齿轮改变为曲柄的水平转向,减小了小车的重心在垂直方向的改变量,让小车更稳定。另外,转向机构的运动完全由驱动轴引出来,因此,小车的转向直接与唯一产生对应关系,减少了误差的产生。
4. 在整体设计计算过程中,我们降低了小车牵引力,让小车保持较低的速度前进,以利于物体的重力势能更多的转化为小车前进的动能,经过估算,小车前进路程为24.3米(理论值)。
无碳小车设计方案零件图及装配图件附件
5