
五、坐标系及高程系的选择
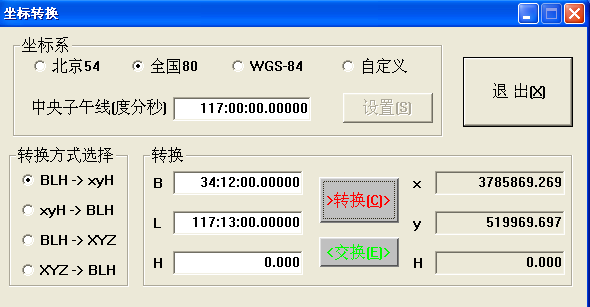
1、因为测区中心的大地坐标已知我们可以利用高斯平面坐标正算的出测区中心的直角坐标,计算用软件实现,过程如下:
再通过给定的测区中心的高程范围可以求得Hm=(30+244)/2=137m
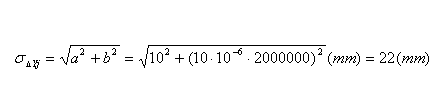
然后可以利用下列式子求得测区中心的综合变形,与±1/40000比较,看是不是要选择独立坐标系。
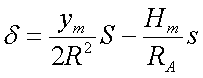
取S=s,R=RA=6371km,Y,H以千米为单位上公式可变为:

通过计算,可以算得综合变形为:-0.000017>-0.000025。所以不用选择独立坐标系。
直接选择中央子午线为117度的高斯平面直角坐标系。
2、由已知条件可知,已知点给出的是1985国家高程基准。所以我也选择85高程系统。
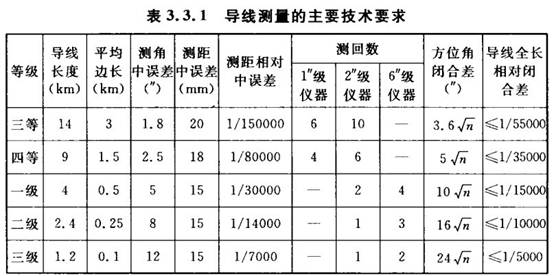
六、现行测量规范:
(1)全球定位系统(GPS)测量规范,GB/T 18314-2009。
(2)全球定位系统城市测量技术规程,CJJ73-97。
(3)工程测量规范,GB50026-2007。
(4)城市测量规范,CJJ8-99。
(5)国家一、二等水准 测量规范,GB12897-91。
(6)国家三、四等水准 测量规范。GB12898-91
(7)《1:500 1:1 000 1:2 000地形图图式》GB/T20257.1-2007;
七、经费预算可参考下列数据:
GPS单频接收机每台1.5万元,双频接收机每台5万元;全站仪每台2万元;DJ2经纬仪每台2万元;DS1水准仪每台8千元,DS3水准仪每台2千元;标石每座100元。
测绘人员每人每天生活补贴费100元。交通、住宿费按每人每天200元计算。
不可预见费按总费用的10%计算。
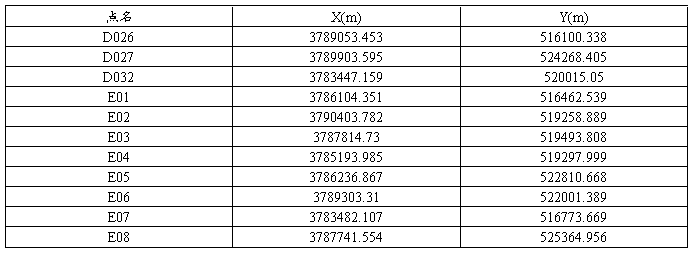
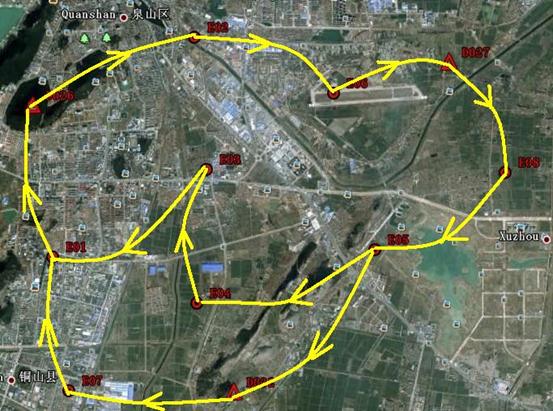
每个点的经纬度及其分布图如下
D026 D027
D027
D032
EO1
E02
E03
E04
E05
E06
E07
E08
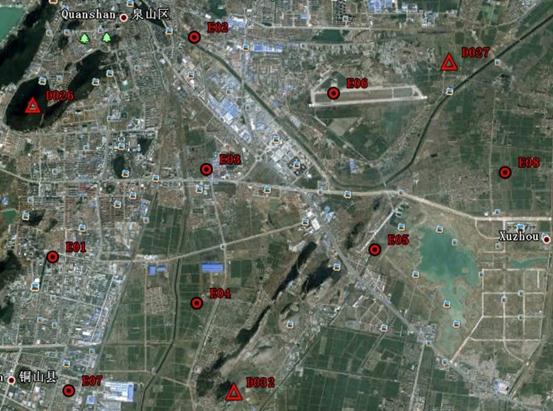
GPS布置网如图(相同颜色为同一时段独立基线):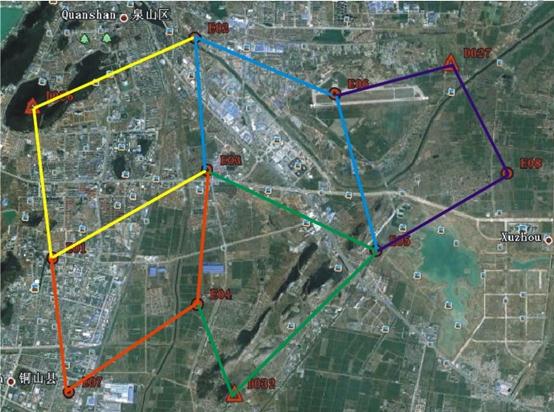
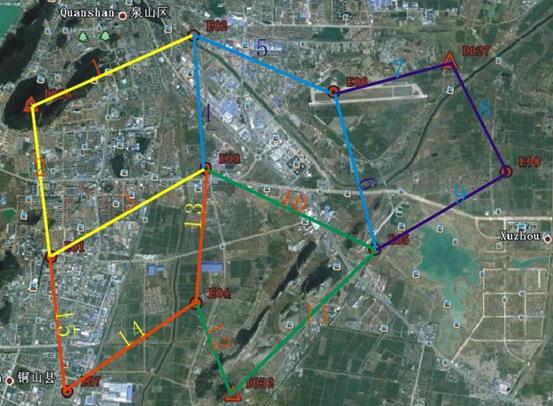
给各基线编流水号(如下):
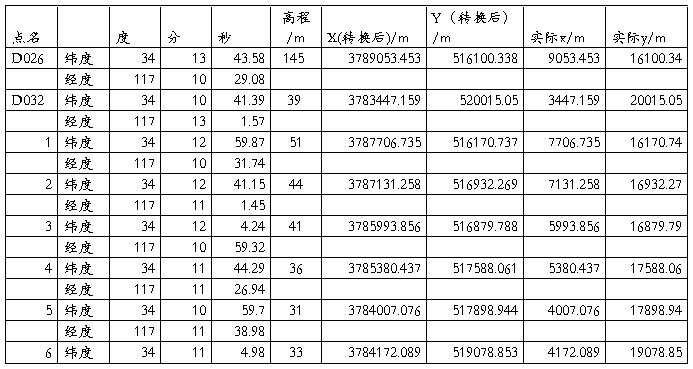
各点近似经纬度(如下表):

再通过坐标转换,可以求出每个点的80坐标:
下面是其中一个由大地坐标转换为高斯平面坐标的示意

国家80平面坐标如下:
对每条基线进行距离和中误差计算
以2500米作为单位观测误差,所以单位观测中误差为:
按照公式

若第 j 某条基线向量的长度为 2 km,则其ΔX、ΔY的观测值中误差分别为:


通过计算得各点权如下表:

通过matlab软件,通过编写程序得出P阵,B阵,和法矩阵BTPB阵,及Qxx阵。
程序如下:(已知点用99表示)
B=zeros(30,15);
JK=[2,99;1,99;3,1;2,3;2,6;5,6;6,99;8,99;8,5;5,3;5,99;4,99;4,3;7,4;1,7;];
i=1;
while 1
if i==16;
break;
end
j=JK(i,1);k=JK(i,2);
B((i-1)*2+1,(j-1)*2+1)=1;
B((i-1)*2+2,(j-1)*2+2)=1;
if k==99
a=1;
else
B((i-1)*2+1,(k-1)*2+1)=-1;
B((i-1)*2+2,(k-1)*2+2)=-1;
end
i=i+1;
end
P=blkdiag(0.566,0.566,0.738,0.738,0.553,0.553,0.934,0.934,0.744,0.744,0.656,0.656,1.115,1.115,1.054,1.054,0.741,0.741,0.5,0.5,0.437,0.437,1.588,1.588,0.917,0.917,0.704,0.704,0.909,0.909);
BTPB=B'*P*B;
QXX=inv(BTPB);
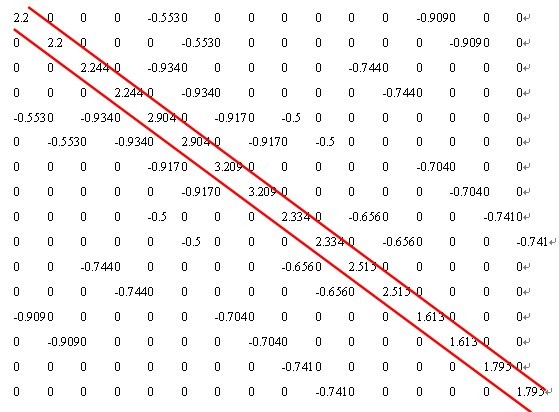
得出P阵(30×30)如下:
P=blkdiag(0.566,0.566,0.738,0.738,0.553,0.553,0.934,0.934,0.744,0.744,0.656,0.656,1.115,1.115,1.054,1.054,0.741,0.741,0.5,0.5,0.437,0.437,1.588,1.588,0.917,0.917,0.704,0.704,0.909,0.909)
得出B阵(30×16)
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
-1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
0 -1 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 -1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 -1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 -1 0 0 0 0
0 0 0 0 0 0 0 0 1 0 -1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 -1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0 -1 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 -1 0 0 0 0 0 1
0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 -1 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 -1 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 -1 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 -1 0 0 0 0 0 1 0 0
1 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 -1 0 0
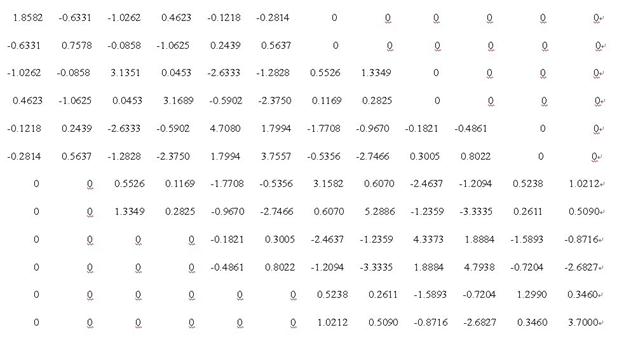
得出BTPB阵(16×16)如下:
得出Qxx阵(16×16)如下:
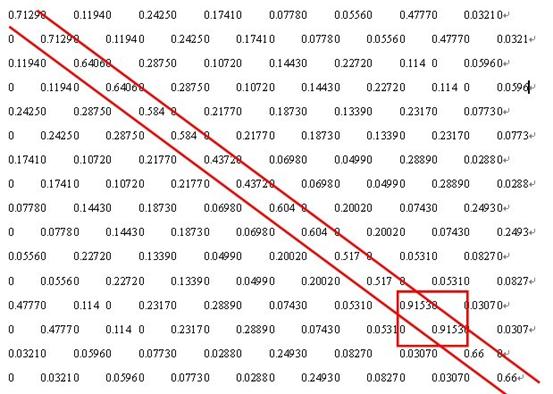
经过观察可以得出:
E07号点为最弱点,其协因数为:
Qxx=0.9153 Qyy=0.9153 Qxy=0
单位权中误差为:

导线网(加密网)设计图如下:






















1点
2点
3点
4点
5点
6点
未知点的近似坐标计算:
导线网的权阵
P=blankdiag(1,1,1,1,1,1,1,1,1,1,1,1,1);
Matlab程序如下:
B=zeros(13,6);
JKH=[1,2,-1;2,3,1;3,4,2;4,5,3;5,6,4;6,-2,5]; JK=[1,-1;1,1;3,2;4,3;5,4;6,5;-2,6];
XYJS=[9053.453,16100.338;7706.735,16170.737;7131.258,16932.269;5993.856,16879.788;5380.437,17588.061;4007.076,17898.944;4172.089,19078.853;3447.159,20015.05;];
ro=2062.65;
i=1;
while 1
if i==7;
break;
end
j=JKH(i,1);k=JKH(i,2);h=JKH(i,3);
if j<=0
j=6+abs(j);
end
if k<=0
k=6+abs(k);
end
if h<=0
h=6+abs(h);
end
dxjk=XYJS(k,1)-XYJS(j,1);dyjk=XYJS(k,2)-XYJS(j,2);
dxjh=XYJS(h,1)-XYJS(j,1);dyjh=XYJS(h,2)-XYJS(j,2);
sjk0=dxjk*dxjk+dyjk*dyjk;
sjh0=dxjh*dxjh+dyjh*dyjh;
j=JKH(i,1);k=JKH(i,2);h=JKH(i,3);
if j<=0 & k<=0
A=0;
end
if j<=0 & k>=0
B(i,k*2-1)=-ro*dyjk/sjk0;B(i,k*2)=ro*dxjk/sjk0;
end
if k<=0 & j>=0
B(i,j*2-1)=ro*dyjk/sjk0;B(i,j*2)=-ro*dxjk/sjk0;
end
if k>=0 & j>=0
B(i,j*2-1)=ro*dyjk/sjk0;B(i,j*2)=-ro*dxjk/sjk0;B(i,k*2-1)=-ro*dyjk/sjk0;B(i,k*2)=ro*dxjk/sjk0;
end
if j<=0 & h<=0
A=0;
end
if j<=0 & h>=0
B(i,h*2-1)=ro*dyjh/sjh0;B(i,h*2)=-ro*dxjh/sjh0;
end
if j>=0 & h<=0
B(i,j*2-1)=B(i,j*2-1)-ro*dyjh/sjh0;B(i,j*2)=B(i,j*2)+ro*dxjh/sjh0;
end
if j>=0 & h>=0
B(i,j*2-1)=B(i,j*2-1)-ro*dyjh/sjh0;B(i,j*2)=B(i,j*2)+ro*dxjh/sjh0;B(i,h*2-1)=ro*dyjh/sjh0;B(i,h*2)=-ro*dxjh/sjh0;
end
i=i+1;
end
while 2
if i==14;
break;
end
j=JK(i-6,1);k=JK(i-6,2);
if j<=0
j=6+abs(j);
end
if k<=0
k=6+abs(k);
end
dxjk=XYJS(k,1)-XYJS(j,1);dyjk=XYJS(k,2)-XYJS(j,2);
sjk0=sqrt(dxjk*dxjk+dyjk*dyjk);
j=JK(i-7,1);k=JK(i-7,2);
if j<=0 & k<=0
A=0;
end
if j<=0 & k>=0
B(i,k*2-1)=dxjk/sjk0;B(i,k*2)=dyjk/sjk0;
end
if k<=0 & j>=0
B(i,j*2-1)=-dxjk/sjk0;B(i,j*2)=-dyjk/sjk0;
end
if k>=0 & j>=0
B(i,j*2-1)=-dxjk/sjk0;B(i,j*2)=-dyjk/sjk0;B(i,k*2-1)=dxjk/sjk0;B(i,k*2)=dyjk/sjk0;
end
i=i+1;
end
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1,1);
BTPB=B'*P*B;
QXX=inv(BTPB);
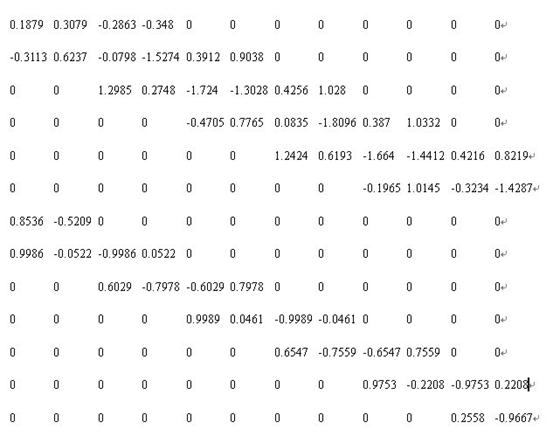
得到B阵(13×12)如下:
得到BTPB(12×12)阵如下:
得到Qxx阵(12×12)如下:
 通过观察1号点为最弱点。
通过观察1号点为最弱点。
其协因数为:
Qxx=0.8542 Qyy=2.2491 Qxy=1.3851
单位权中误差为:

3.水准网可布设四等附合或闭合水准网,平均1~2km一个水准点。估算最弱点高程中误差≤2cm。
水准网设计图如下:












水准网精度估计,采用间接平差法,通过matlab编写程序如下:
B=zeros(12,8);
JK=[1,99;2,99;6,2;6,99;8,99;8,5;5,4;4,3;3,1;5,99;7,99;1,7];
i=1;
while 1
if i==13;
break;
end
j=JK(i,1);k=JK(i,2);
B(i,j)=1;
if k==99
a=1;
else
B(i,k)=-1;
end
i=i+1;
end
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1);
BTPB=B'*P*B;
QXX=inv(BTPB);
P阵为:
P=blkdiag(1,1,1,1,1,1,1,1,1,1,1,1);
得到B阵(12×8)为:
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 -1 0 0 0 1 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1
0 0 0 0 -1 0 0 1
0 0 0 -1 1 0 0 0
0 0 -1 1 0 0 0 0
-1 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 0 1 0
1 0 0 0 0 0 -1 0
得到BTPB阵(8×8)为:
3 0 -1 0 0 0 -1 0
0 2 0 0 0 -1 0 0
-1 0 2 -1 0 0 0 0
0 0 -1 2 -1 0 0 0
0 0 0 -1 3 0 0 -1
0 -1 0 0 0 2 0 0
-1 0 0 0 0 0 2 0
0 0 0 0 -1 0 0 2
得到Qxx阵(8×8)为:
 0.5641 0 0.4103 0.2564 0.1026 0 0.2821 0.0513
0.5641 0 0.4103 0.2564 0.1026 0 0.2821 0.0513
 0 0.6667 0 0 0 0.3333 0 0
0 0.6667 0 0 0 0.3333 0 0
 0.4103 0 1.0256 0.641 0.2564 0 0.2051 0.1282
0.4103 0 1.0256 0.641 0.2564 0 0.2051 0.1282
0.2564 0 0.641 1.0256 0.4103 0 0.1282 0.2051
0.1026 0 0.2564 0.4103 0.5641 0 0.0513 0.2821
0 0.3333 0 0 0 0.6667 0 0
0.2821 0 0.2051 0.1282 0.0513 0 0.641 0.0256
0.0513 0 0.1282 0.2051 0.2821 0 0.0256 0.641
通过观察3、4号点为最弱点。
其协因数为:
Qxx=1.0256
单位权中误差为:

第二篇:大地测量实习报告
教 学 实 习 报 告
题 目: 学
院 专业 班
学生姓名:学 号:
班级序号:
指导老师:
起止日期:
教学实习目的及任务:
独立完成等级控制测量任务是衡量同学们学习掌握本专业知识水平、能否成为一个合格的测量工程专业高级人才的一个重要标志,本次实习的目的主要是训练同学们等级控制测量的操作能力,使同学们对等级控制测量的全过程有一个完整的认识,做到会测、会进行数据处理及平差计算,为今后参加工作打下基础。
本次控制测量实习的任务有:1.四等平面控制测量;2.二等水准测量。
本次控制测量实习的技术要求按《城市测量规范》中有关规定执行;测区内采用独立平面直角坐标系统,独立高程系统。
教学实习地点:
中国地质大学(武汉)东、西两区内
实习仪器:
平面控制测量实习:
2″级全站仪每组一台套,记录板、记录手簿、计算器。
高程控制测量实习:
DZ2自动安平水准仪一台,太阳伞一把,记录板、记录手簿、计算器、皮尺。
实习小组成员:
教师评语:
实习路线及简介:
二等水准测量:
第一圈:从东二门控制点开始,经过西二门、一卡通管理中心、文化楼,教三楼、
体育馆、教二楼、59栋宿舍、19号控制点、水工楼、小树林、数理楼、主楼至东二门控制点闭合。
第二圈:从东二门控制点开始,经过校医院、化石林、实验室、90号控制点、珠宝学院大楼、教务处、东大门至东二门闭合。
备注:其中,两个圈共同控制点为东二门外面的控制点。
四等平面控制测量:水工楼、西大门、行政楼、东区桥头、校医院、西二门、机房、文化楼、教三楼、体育馆、西区57栋、西一食堂、西二食堂、垃圾站、水工楼。
实习内容:
水准测量
1. 作业前进行: I、i角与交叉误差的检验和校正;
II、 水准仪园水准器安置正确性的检校; III、水准尺上园水准器安置正确性的检校。
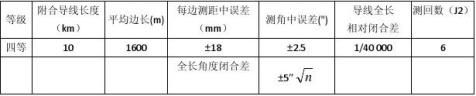
2. 水准测量有关限差见下表:

注L为环线长,以km为单位
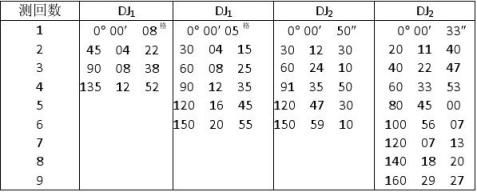
3.观测记录:
往测时,奇数测站照准水准标尺分划的顺序为:后前前后 往测时,偶数测站照准水准标尺分划的顺序为:前后后前
返测时,奇、偶数测站照准标尺的顺序分别与往测偶、奇数测站相同
4.观测结果的重测和取舍: ○1 .观测结果超限必须进行重测。
○2.测站观测限差超限必须立即重测,否则从水准点或间隙点起重测。 ○3.测段往返测高差较差超限必须重测,重测后应选用往返合格的成果。如重测
结果与原测结果分别比较,较差均不超过限差时,取三次结果的平均值。 ○4.观测过程中,下丝读数距地面不足30cm,重新架站观测。 ○5.由于观测错误而返测时,两个控制点之间的所有设站都必须重新测量,并进行往返测。
平面控制测量
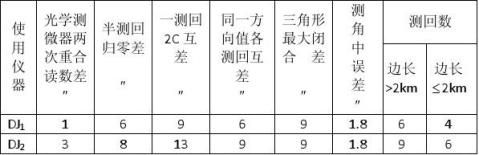
1. 作业前应进行: I、光学测微器行差和隙动差的测定;
II、 光学对中器的检验和校正。
2. 控制网为边角同时测定的四等三角网。边长相对中误差不大于1/4.5万。采
用方向观测法观测,用DJ1经纬仪观测6个测回,DJ2经纬仪观测9个测回。当边长小于等于2km时,测回数相对减少,即用DJ1经纬仪观测4个测回,DJ2经纬仪观测6个测回。
3. 重测应在基本测回完成并对成果综合分析后再进行。成果的重测和取舍的
详细规定,按照《规范》第2·3·12条执行。
4. 作偏心观测时,偏心距测定误差??2mm,偏心角测定误差??2?。 5. 偏心测距时,一定不要忘记观测每一条边的偏心角,否则就不能进行偏心
距改正。
的相邻测回进行比较,其差值仍按上表规定。按此方法比较应在手簿中注明。 6、四等导线测量。
城市测量电磁波导线的主要技术要求
四等以上导线水平角的观测,应在观测总测回中以奇数测回和偶数测回分别观测导线前进方向的左角和右角。
采用左、右角观测法,各观测3个测回,左角(奇数测回)和右角(偶数测回)分别取中数,按?=〔左角〕360?计算,???5.0??。观测右角时仍按左中+〔右角〕中-
角起始方向为准变换度盘位置。
实习成果:
实习程中遇到的问题及体会:
二等水准测量要求较以往的四等水准测量的要求要高许多,不管是精度要求还是仪器操作方面。在我们拿到仪器后首先要做的就是i角检验,这个看似简单的问题却让我们花费了一个下午的时间,实际上我们一个下午都在练习如何操作仪器。可能是以前的定时思维的因素吧,当我们开始操作仪器时,很习惯的用起了以前的方法,结果导致误差频频超限。刚开始我们还怀疑是不是仪器有问题,因为我们小组5个人都测过了,结果很是很无情的5人都超限,终于,在岳老师的帮助下我们重新理我一下思路,严格按照老师说的操作准则老操作,结果奇迹出现了,我们终于不超限了。从这次实习可以看出我们存在的问题,比如,不注意操作规范,没有静心思考就盲目的找借口,这些都是不可取的,是应当严格杜绝的行为。知道了操作规范后,我们的进展也不是很顺利,小组有人测得快又准,有人测的慢而且频频超限,但是我们小组秉着和谐进步的精神对那些测的慢得成员很多机会练习,我们不抢快,只想把所有成员都训练成为一个合格的测绘人员,为以后的工作打下坚实的基础。
就在这不慌不忙中我们顺利的完成了我们的实习任务,通过这次实习,我明白了,工作要细心对待,无论做什么工作都要有耐心,一旦选择就不要后悔。其次,我懂得了作为一个团体,在工作当中每个人所要展现的个人素质:相互团结,多做事,不攀比,不吆喝,人人平等,当然还要有纪律性,有组织性。
四等平面控制测量是我们这次实习的第二项内容,要求较高,要求每个角测六个测回,而且还分左右角。奇测回数测左角,偶测回数测右角。在刚开始测量时给了我们很大的困惑,因为当时老师不在场,所以我和我小组成员争吵的很激烈,双方都在为如何实施测量而争论。虽然表面上看这是不好的行为,但是实际上对我们来说收获还是很大的,这次争吵至少我们最后可以在没有老师指导的情况下独立完成了,这就是我们的进步,我觉得有些事就应该先尝试独立去完成,只有这样知识才会记得更牢
固。还有由于天气的问题,我们的实习进度被耽误了很多,有时候来来往往的人群也是我们测量人员的障碍,总之,实习还是相对顺利的。
这些天的实习不仅增强了我们的实践能力,还增强了我们的体魄,正因为有了我们测绘人的强健的体魄,才能铸就人类工程史上一件又一件的伟大奇迹。
最后感谢老师对我们实习的大力支持和谆谆教导!