四轮驱动全向移动机器人的设计项目研究总结报告
摘要:我们设计的四轮驱动机器人的系统主要由Mecanum全向轮、避震机构、伺服驱动模块和上位机等组成,整个系统采用锂电池供电。机器人采用四轮驱动方式,全向轮是整个设计的核心部分,是实现全向运动的前提。控制系统主要由PLC控制直流伺服电机实现,上位机是PC机,通过操作PC机上的软件,传递信息至PLC,PLC控制机器人实现相应的运动。上位机并将机器人的运动状态等信息显示出来。
关键词:四轮驱动;Mecanum轮;全向移动;机器人
一、 项目执行情况
我们的研究工作大致分为三个阶段。这三个阶段是:
① 第一阶段:初期准备及方案初定(2014.6至2014.8)
准备和查阅相关资料和文献,确立明确的思路,制定明确合理的实验规划。合理调整好组内部的分工,认真讨论项目的实际执行方案和征求指导老师意见,对项目的具体事宜进行必要的分析。
主要完成的工作是组员杨焱麟和朱同雄学习了CATIA三维绘图,组员王力学习了VC++上位机编程,组员李剑学习了西门子S7-1200PLC和51单片机的编程及应用。小组并和老师讨论了初步的方案。
② 第二阶段:机器人机械结构组装和控制系统设计(2014.9至2015.3)
对所用电机功率和电池容量等进行必要计算,并据此购买型材、电机、减速器、锂电池等,进行机加工和组装,基本搭建出机器人的底盘平台。根据方案要求设计机器人的控制系统和上位机界面。
③ 第三阶段:准备答辩验收(2015.4至2015.5)
认真总结在本次项目中所取得的成果和收获,并思考工作中所遇到的问题。填写结题申请表、撰写研究总结报告、参加结题答辩等。
二、 项目所取得的成果
1. 四轮驱动移动机器人机械结构设计
1) 轮系设计
本课题采用的全向轮为Mecanum轮,可以实现全向移动,其全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小棍子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
由于我们采用了四轮驱动,即可以控制四个电机实现不同的转动的方向和不同的速度,从而可以在狭小的空间实现全向移动。例如当左前轮正转,右前轮反转,左后轮反转,右后轮正转的时候,机器人就可以直接横向往右移动。
2) 底盘、减震系统设计
由于机器人采用四轮驱动系统,想要机器人运动,必须引入减震系统,来解决机器人四轮着地的问题。常见的减震系统是汽车的悬挂系统减震,汽车悬架系统采用的减震器多是液力减震器。对于设计的小吨位承载机器人,如果引入汽车的悬挂系统,面临成本太高和体积过大的问题,故不宜采取该方案。我们采用了一套简易的悬挂系统,在每个轮子上面采用了两个弹簧,在弹簧的上面再安装机器人的底盘结构,这样在机器人运动过程中,会保证四轮同时着地。
2. 机器人控制系统的设计
1) 运动控制系统概述
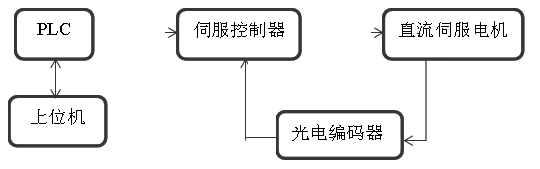
运动控制系统主要实现的功能是直流伺服电机闭环调速和上位机和下位机的通信。控制器以西门子公司的S7-1200 PLC为核心,对四路直流伺服电机进行闭环控制,通过以太网和无线路由器实现和上位机的通信,实时处理上位机发送的运动控制信息,让机器人按照预定的要求进行运动。
直流伺服电机凭借着其良好的调速特性,在机器人的控制领域得到了广泛的应用,同时伴随着各种新型直流伺服电机的出现,应用比例也逐渐增加。
2) 直流伺服电机控制模块
为了提高电机的运行稳定性,实际设计过程中,单独的电机开环系统是不能满足要求的。课题采用了速度反馈闭环系统,加上先进PID控制算法,利用DA模块输出模拟电压对电机的速度的进行控制,能起到很好的效果。
控制系统采用了速度闭环控制,PLC通过输出模拟电压来控制电机的转速,由光电编码器检测出电机的实际转速,将实际值和理论值进行比较,经过数字PID运算后,更新输出到各个电机的模拟电压值,以达到对电机的实时控制。
3) 上位机
上位机是采用VC++6.0软件编程来实现的。上位机主要是采集直流伺服电机编码器数据,进行运动学方面的计算,得出机器人的实时位姿。并且可以在软件窗口上显示出来,提高软件的可视性。
上位机与PLC是通过串口通讯,PLC先采集光电编码器的直流电机转速数据,通过串口发给上位机,在上位机软件中有相应的接口程序接受传送过来的数据。数据的处理是由根据运动分析设计出来的处理函数来进行的。在本项目中,我们经过处理后得到的是机器人实际运动方向与正前方的夹角 ,通过 参数可以将机器人现在的位姿在软件的主窗口中显示出来。
软件窗口中小车的绘制是采用了OpenGL类库,这是一种跨平台的API。可以用来生成三维的图形。
软件除了可以检测并且显示机器人实时的位姿,还可以通过窗口上的按钮来实现用电脑手动控制机器人的运动。在这个上位机平台的基础上我们还可以添加一些接口程序来实现游戏手柄的控制或者飞行摇杆的控制,因为时间有限我们暂时没有加上。
三、 项目中的不足
1. 未能解决移动机器人在进行转弯时四轮差速的算法问题
移动机器人在转弯时,前后左右的轮子的转速都是不一样的,要实现差速转向,就必定存在算法问题。由于一般的汽车都由两轮驱动,少部分汽车也是四轮驱动,但由于汽车的差速都由机械差速器来完成,所以这方面可供参考的资料比较少,而现在研究的大部分移动机器人都是采用两轮驱动,四轮驱动的算法也是很少的,所以导致我们可供参考的资料较少,未能完成这一算法的研究。
2. 没有设计出遥控手柄等无线方式操纵移动机器人的方法
很多移动机器人均可以采用无线手柄进行远程的空竹,因我们的上位机采用笔记本电脑开发,电脑控制移动机器人就必须使用网线将电脑与PLC连接起来,操作移动机器人时必须是在笔记本电脑上完成,因此无法使用无线的方式进行远程的控制。
四、 总结和收获
在这次做项目中,我们真的受益匪浅。创新实验,并不是大学物理实验,老师一步步教我们去做,而是做一个我们从未接触过的东西。我们学习知识,独立思考,积极创新,使自己的作品更加完美。而创新意识的锻炼对我们来说又是弥足珍贵的,创新,并不是随意猜测,更不能偏离主题。他是一种理论练习实际的有目的的假设,我们做这样一个假设,之后通过自己的实验去验证。创新不仅仅是创造新的事物,更是从新的角度来思考问题,找到各个事物表象背后所昭示的问题实质。创新思维能开拓我们的视野,同时给我们的工作与学习带来不断的惊喜。创新项目过程中有过汗水和挫折,但我们最终收获到了知识和能力,回想起来,过程也是很幸福的。
第二篇:合肥工业大学大学生创新训练计划项目申请书
附件1
级大学生创新训练计划项目
申 报 书
项目名称
申 请 者
所在学院
专业年级
指导教师
项目起止时间
联系电话
电子信箱
合肥工业大学创新学院

填 表 须 知
一、《合肥工业大学大学生创新训练计划项目申报书》(注明国家级或校级)要按顺序逐项填写,内容要实事求是,表达要明确、严谨。空缺项要填“无”。要求一律用A4纸正反页打印,于左侧装订成册。
二、申请参加合肥工业大学大学生创新训练项目团队人数不得超过5人(1人为立项负责人,参与合作研究者1-4人)。
三、《合肥工业大学大学生创新训练计划项目申请表》由申报学生所在学院初审,签署意见后,一式二份报送创新学院。
四、如填表有不明事宜,请与创新学院联系和咨询。(联系电话:2901107)