从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。经典控制论限于处理单变量的线性定常问题,在数学上可归结为单变量的常系数微分方程问题。现代控制论面向多变量控制系统的问题,它是以矩阵论和线性空间理论作为主要数学工具,并用计算机来实现。现代控制论来源于工程实际,具有明显的工程技术特点,但它又属于系统论范畴。系统论的特点是在数学描述的基础上,充分利用现有的强有力的数学工具,对系统进行分析和综合。系统特性的度量,即表现为状态;系统状态的变化,即为动态过程。状态和过程在自然界、社会和思维中普遍存在。现代控制论是在引入状态和状态空间的概念基础上发展起来的。状态和状态空间早在古典动力学中得到了广泛的应用。在5O年代Mesarovic教授曾提出“结构不确定性原理”,指出经典理论对于多变量系统不能确切描述系统的内在结构。后来采用状态变量的描述方法,才完全表达出系统的动力学性质。6O年代初,卡尔曼(Kalman)从外界输入对状态的控制能力以及输出对状态的反映能力这两方面提出能控制性和能观性的概念。这些概念深入揭示了系统的内在特性。实际上,现代控制论中所研究的许多基本问题,诸如最优控制和最佳估计等,都是以能能控性和能观性作为“解”的存在条件的。
现代控制理论是一门工程理论性强的课程,在自学这门课程时,深感概念抽象,不易掌握;学完之后,从工程实际抽象出一个控制论方面的课题很难,如何用现代控制论的基本原理去解决
生产实际问题则更困难,这是一个比较突出的矛盾。
对现代控制理论来说,首先遇到的问题是将实际系统抽象为数学模型,有了数学模型,才能有效地去研究系统的各个方面。许多机电系统、经济系统、管理系统常可近似概括为线性系统。线性系统和力学中质点系统一样,是一个理想模型,理想模型是研究复杂事物的主要方法,是对客观事物及其变化过程的一种近似反映。现代控制论从自然和社会现象中抽象出的理想模型,用状态空间方法表示,再作理论上的探讨。
…… …… 余下全文







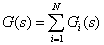
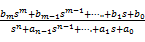 ,实现存在的条件是系统必须满足m<=n,否则是物理不可实现系统
,实现存在的条件是系统必须满足m<=n,否则是物理不可实现系统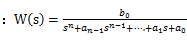
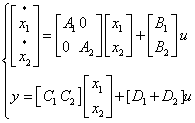
 程(外部描述)
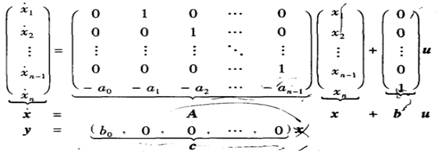
程(外部描述) =Ax+Bu
=Ax+Bu  =
=
 +
+

 ,
,
 ,
,

 )Bu(
)Bu( ) d
) d