声源定位和GPS模拟实验报告
一.实验原理
1. 声源定位(二维)
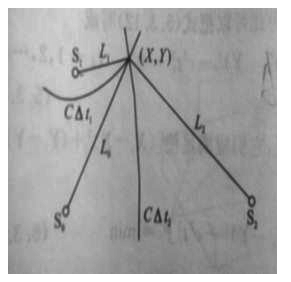

如图所示,3个接收传感器S 0、S 1、S 2的坐标分别是(X 0,Y 0)、(X 1,Y 1)、(X 2,Y 2),当平面上某处(X,Y)发出超声波时,该信号将先后被3个传感器所接收,设时间分别是t 0,t 1,t 2,实验只能测出它们到达各个传感器的时间差△t 1=t 1-t 0, △t 2=t 2-t 0。设声波沿媒质表面的传播度为c,对换能器S 0、S 1而言,声源发生的位置应该在到该两点的距离差为c△t 1的曲线上,这是一条双曲线。显然,利用△t 1、△t 2可以得到两条双曲线,它们的交点即是声源
将S0设为原点,声源位置为(X,Y),用极坐标表示,则满足:


化简整理的

令



引入 ,
, 。
。 则可得
则可得
至此,声源位置已通过极坐标给出。
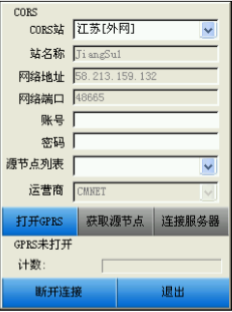
2. GPS模拟
本实验对GPS过程的声学模拟是在一个二维的平面上进行的,位置(Xi,Yi)(i=1,2,……)已知的发送换能器(传感器做发送用,模拟“导航卫星“)发出声波(模拟卫星发出的电磁波),被位置(X,Y)的待求接收传感器(模拟用户)接收,它们之间有关系:
 (i=1,2,……)
(i=1,2,……)
式中c为波的传播速度。显然,对一个二维的定位问题(确定X和Y),如果传播速度已知,要算出X和Y可以归结为一个求解两个变量的代数方程问题,也就是说原则上只要有两颗不同位置的模拟卫星就行了。实际的GPS定位,则至少要对四颗卫星同时进行测量,才能确定地球坐标系中的三维坐标和因接收机时钟不同步所造成的种差修正。在本实验中,为了减小时差不准对定位精度的影响,应当获取来自多个“卫星“的位置和时差信息,并通过最小二乘法求得”用户“的位置和声波的传播速度。即当n大于3时,
…… …… 余下全文