丽水职业技术学院
实训总结报告
课程: 电气控制与PLC
班级: xxxx
姓名: xxxx
学号:
二〇20xx年x月x日
实训目的
这次实训的目的主要是为了让我们掌握由电气原理图变换成安装接线图的知识。 学习PLC的实践接线和程序的编写。同时学会分析、排除线路故障的方法,通过亲自动手增强实际连接控制电路的能力和操作能力。理论和实践相结合让我们对学过的知识有更深的了解,在实践中了
解理论知识的重要性并且找到自己的不足,让以后的学习目标更加的明确。
实训内容
实训一:三相鼠笼式异步电动机星三角降压起动控制
一、实验目的
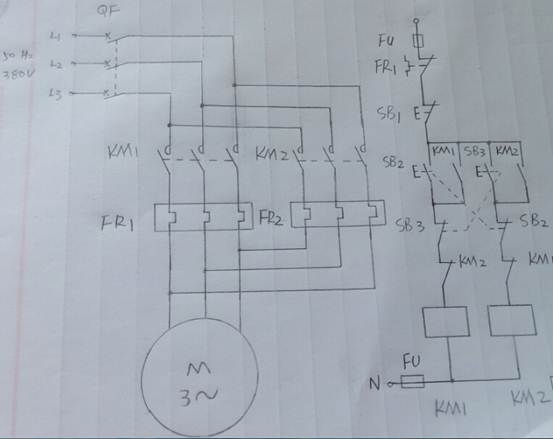
1、通过对三相鼠笼式异步电动机正反转控制线路的安装接线, 掌握由电气原理图接成实际操作电路的方法。
2、加深对电气控制系统各种保护、自锁、互锁等环节的理解。
3、学会分析、排除继电--接触控制线路故障的方法。
二、原理说明
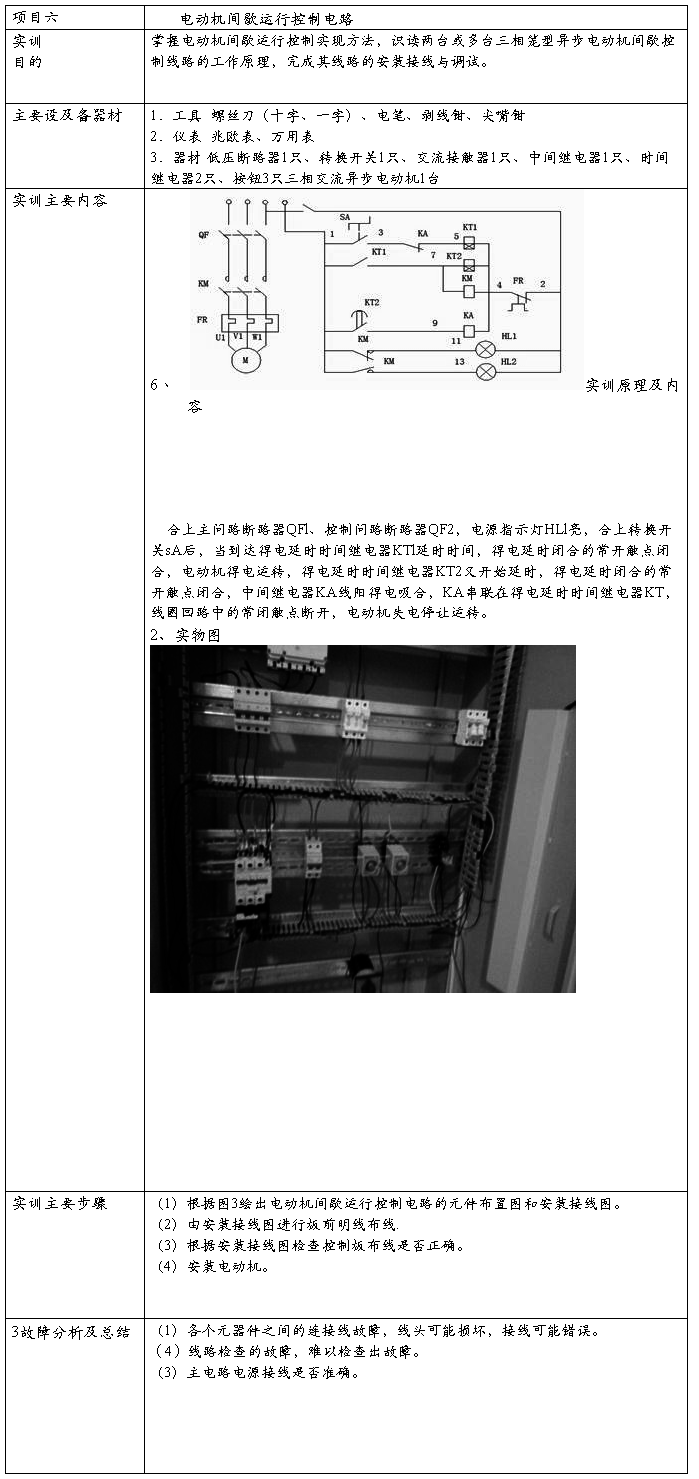
按时间原则控制电路的特点是各个动作之间有一定的时间间隔,使用的元件主要是时间继电器。按时间原则控制鼠笼式电动机Y-△降压自动换接起动的控制线路。当接触器KM1、KM2主触头闭合,KM3主触头断开时,电动机三相定子绕组作Y连接;而当接触器KM1和KM3主触头闭合,KM2主触头断开时,电动机三相定子绕组作△连接。因此,所设计的控制线路若能先使KM1和KM2得电闭合,后经一定时 间的延时,使KM2失电断开,而后使KM3得电闭合,则电动机就能实现降压起动后自动转换到正常工作运转。
这个实验让我了解时间继电器的结构、使用方法、延时时间的调整及在控制系统中的应用。让我对电路接线有了更深的了解。
实训二: 三相鼠笼式异步电动机的反接制动控制
一、实验目的
1. 进一步提高按图接线的能力
2. 了解时间继电器的结构、使用方法、延时时间的调整及在控制系统中的应用。
…… …… 余下全文