青岛理工大学琴岛学院
课程设计报告
课题名称:智能循迹机器人小车 学 院:机电工程系
专业班级:电气工程及其自动化 学 号:20100202129 学 生:许辉
指导老师:张岐磊
青岛理工大学琴岛学院教务处 2012 年 12 月 14 日
…… …… 余下全文
青岛理工大学琴岛学院
课程设计报告
课题名称:智能循迹机器人小车 学 院:机电工程系
专业班级:电气工程及其自动化 学 号:20100202129 学 生:许辉
指导老师:张岐磊
青岛理工大学琴岛学院教务处 2012 年 12 月 14 日
…… …… 余下全文

Harbin Institute of Technology
课程设计说明书(论文)
课程名称: 单片机课程设计
设计题目: 智能循迹小车
院 系: 电气学院测控系
班 级: 光电五班
设 计 者: 谢鹏、于鸿杰
学 号: 1110100426、
指导教师: 胡瑞强
设计时间: 2014.9.10
哈尔滨工业大学
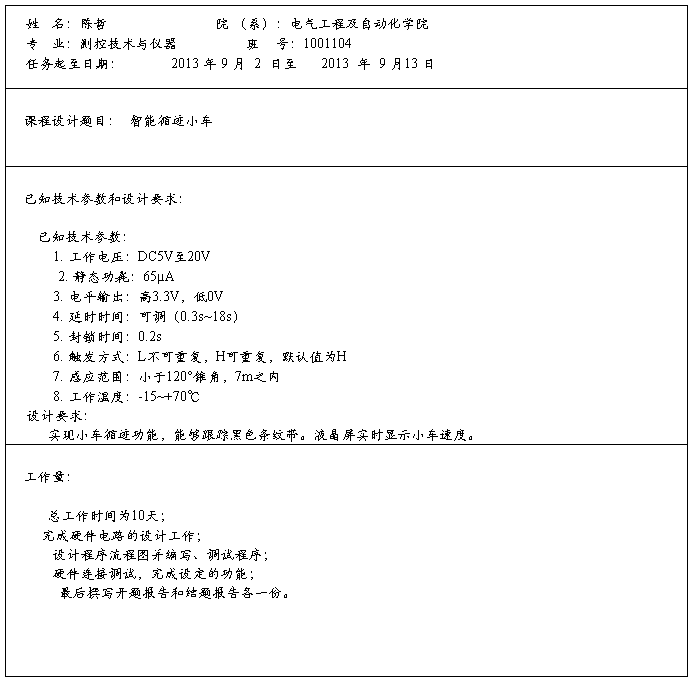
哈尔滨工业大学课程设计任务书

*注:此任务书由课程设计指导教师填写
开题报告
1.1课题目的
《单片机原理及应用》是一门应用设计类课程,也是一门工程实践性很强的课。做到理论与实践相结合,灵活运用、融会贯通,提高实际动手能力,是我们学习这门课的最终目的。在这次的单片机课程设计中,我们的主要目的是:
(1)设计一辆电动小车,使它能够从起始端出发,自动地沿着黑线行驶。
(2)在此基础上适当地进行功能扩展,扩展目标初步定为:增加红外遥控功能。
…… …… 余下全文

Harbin Institute of Technology
课程设计说明书(论文)
课程名称:单片机课程设计
设计题目:智能循迹小车
院 系:测控技术与仪器系
班 级: 1001104
设 计 者:陈哲
学 号: 1100100534
指导教师:周庆东
设计时间: 2013/9/2—2013/9/13
哈尔滨工业大学
哈尔滨工业大学课程设计任务书
*注:此任务书由课程设计指导教师填写
开题报告
(一)立项背景
本次的课程设计的主要任务是设计一个能够通过红外对管识别黑线、通过PWM电路模块进行调速跟踪黑色条纹带以及通过LCD液晶模块进行脉冲、速度、PWM的占空比三个参数的显示的智能小车。控制板的设计以16位的MC9S128单片机为控制核心,MC9S12XS128是一款功能强大的16位微控制器,具有非常丰富的片上资源,如:10位精度的ADC,节省了片外AD;强大的定时器,方便对电机进行控制,可以进行浮点型运算。另外还有精密的比较器,大容量的RAM和ROM,可存储大容量的程序。驱动板则以L289N驱动芯片为核心,应用红外对管和LCD液晶模块,成功的实现小车的循迹、测速、调速和显示功能这四大功能。课题完成了红外对管、单片机、控制板、驱动板选择,采购接口电路的设计和连接以传感器和电路的安装位置和方式的安排,并完成了整个硬件的安装工作。除此之外,还对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成了软件和硬件的融合,基本实现了智能小车要求实现的预期的功能。
…… …… 余下全文
目 录. I
智能寻迹小车设计与实现. I
Smart Car Design and Implementation of Tracting II
第1章 绪 论. 1
第2章 系统的硬件及设计原理. 3
2.1 STC89C52单片机. 3
2.1.1 STC89C52管脚功能. 3
2.1.2复位. 8
2.2光电电路概况. 9
2.2.1防撞. 9
2.2.2寻迹. 9
2.3显示电路. 9
2.3.1数码管. 9
2.3.2发光二极管. 10
2.4电机控制电路. 10
2.4.1电机的选择方案. 10
2.5声控. 12
2.6串口通信. 12
第3章 系统软件设计. 13
3.1总体设计方案和框图. 13
第4章安装调试. 21
4.1焊接. 21
4.2调试(常见问题). 21
第5章 总结心得. 23
[摘要]本设计是以STC89C52为主控核心的简易智能小车系统,实现了小车沿黑带寻迹,编程跑,光开关跑等功能并对其动作相应显示。驱动电机采用L9110直流电机控制芯片。小车软件设计采用分块编程,每个模块实现一个功能,然后通过按键控制小车每个状态切换。小车采用按键控制,当接通电源后,小车显示部分会显示已经准备好了,然后按开关键,进入寻迹过程。寻白线时,外部环境光线的强弱对小车的运动会产生很大的影响,基于此原因,本实验中的寻迹是指在白色地板上寻黑线。寻迹是指通过红外发射管和接收管识别路径。
[关键词] STC89C52 直流电机 黑带寻迹 智能寻迹小车 红外发射管
[Abstract] :This design is the core of STC89C52 as the controller simple intelligent car system, realize the car along the black belt tracing, programming run, light switch function such as run and the corresponding action shows. The motor drive L9110 dc motor control chip. The car software design using block programming, each module implements a function, and then through the button control car every state switch. The control car keys, when switching power supply, the car shows partial will display is ready, and then press enter a key, tracing process. Find the white line, and the external environment of the strength of the light car will produce significant, based on the reason for this, the experiments of tracing is to point to in white floor found the black line. Tracing is through the infrared tubes and receive the recognition path.
…… …… 余下全文
单片机原理及应用
课程大作业设计报告
课题名称:D2-2循迹小车
日 期: 2015.12.23
目录
一、工作原理... 2
二、主要功能... 2
三、电路原理图... 4
四、焊接制作过程... 5
五、测试... 6
六、功能修改及测试... 6
七、protues电路仿真... 7
八、总结... 8
九、附件清单... 9
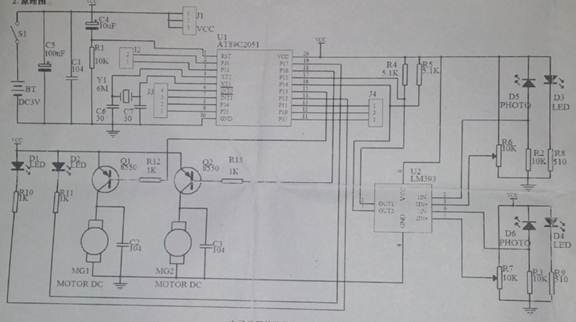
主要功能部件:两对红外线发/收器、一对减速电机、LM393和AT89C2051的芯片各一个。
工作原理:LM393通过检测两边红外线的即时接收情况,从而为AT89C2051反馈电位信号,单片机对电位信号进行检测,从而控制左右减速电机的开关。当红外线遇到黑色轨迹时,接收器无法接收信号,相应反馈一个高电平,对应那边的电机就会停止运转,起到左转的功能,否则,将会反馈一个低电平,对应那边的电机继续运转。当两边都遇到黑色轨迹时,则默认采用左转的机制。
比较器电路图

实现检测红外线接收情况,向P15脚反馈电位信号。

1. 焊接无电极的原件,例如:电阻、晶振、陶瓷电容等。
2. 焊接带电极指示的元件,例如:电解电容、三极管。
3. 焊接芯片插座,注意对准u型口。
4. 焊接发光二极管类元件,注意用欧姆表判断电极。
5. 最后是焊接马达,必须在其他焊接完成后再接入,并确保电机前滚。
…… …… 余下全文
自动寻迹小车
摘要:本寻迹小车是以有机玻璃为车架,ATmage32L单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。系统由mage32通过IO口控制小车的前进后退以及转向。寻迹由RPR220型光电对管完成。本课题是基于AT89C52单片机的智能小车的的设计与实现,小车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。小车系统以AT89S52单片机为系统控制处理器;采用红爱传感获取菜刀的信息,来对小车的方向和速度进行控制。此外,对整个控制软件进行设计和程序的编制以及程序的调试,并最终完成软件和硬件的融合,实现小车的预期功能。
引言
当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。现在外国的自动控制和传感器技术已经达到了很高的水平,特别是日本。
作为机械行业的代表产品一气汽车,其与电子信息产业的融合速度也是显著提高,呈现出 两个明显特点:一是电子装置占汽车整车的价值量比例逐步提高,汽车将由以机械产品为主向高级的机电一体化方向发展,汽车电子产业也很有可能成为依托整车制造业和用车提升配置而快速成为新的增长点;二是汽车开始向电子化、多媒体化和智能化方向发展,使其不仅作为一种代步工具、同时能具有交通、娱乐、办公和通讯等多种功能。勿容置疑,机电一体化人才的培养不论是在国外还是国内,都开始重视起来,主要表现在大学生的各种大型的创新比赛。但很现实的状况是,国内不论是在机械还是电气领域,与外国的差距还是很明显的。为了适应机电一体化的发展在汽车智能化方向的发展要求,提出简易智能小车的构想,目的在于:通过独立设计并制作一辆具有简单智能化的简易小车,并获得项目整体设计能力,并掌握多通道多样化传感器综合控制的方法。所以立“智能寻迹小车”一题作为尝试。
一、实验目的:
通过设计进一步掌握51单片机的应用,特别是在嵌入式系统中的应用。进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。
二、设计方案:
该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以及实现对小车姿态的控制。
三、报告内容安排:
本技术报告主要分为三个部分。第一部分是对整个系统实现方法的一个概要说明,主要内容是对整个技术原理的概述;第二部分是对硬件电路设计的说明,主要介绍系统传感器的十恶极极其其他硬件电路的设计原理等;第三部分是对系统软件设计说明,主要内容是智能模拟车设计中主要用到的控制理论、算法说明及代码设计介绍等。
…… …… 余下全文
华中科技大学电子与信息工程系
硬件课设实验报告
项目名称:智能小车控制系统
班 级: 通信 #### 班
学 号: U20101####
姓 名:
指导老师: # # #
——2013.7.3
课题名称:智能小车自动控制系统
摘要:未来,随着FPGA 从可编程逻辑芯片升级为可编程系统级芯片,其在电路中的角色已经从最初的逻辑胶合延伸到数字信号处理、接口、高密度运算等广阔的范围, 应用领域也从通信延伸到消费电子、汽车电子、工业控制、医疗电子等更多领域。
Basys2 开发板是任何人都通过它的应用过程能够积累实际数字电路设计的经验的FPGA 电路设计应用平台,Basys2 开发板给主机电路提供完整、准备使用的硬件支持,以便从简单的逻辑电路实现复杂的控制。而且包含了许多I/O 接口和的完整的FPGA 支持电路,所以不需要任何其他组件也可以实现很多设计。
本设计基于竞赛组委会提供的BASYS2 技术平台,利用xilinx 公司FPGA 芯片实现了智能小车的控制等的功能。本系统以任务书的要求为目的,采用FPGA 逻辑门为控制核心,利用红外线传感器检测道路上的标志,自动沿着一定的轨迹运动。本设计还利用了超声波模块实时的检测前边的障碍物,并实现了臂章功能。
关键词: FPGA,红外线检测,电动小车
Design and create an intelligence electricity motive small car
…… …… 余下全文

