苏 州 市 职 业 大 学
课程设计说明书
名称 会追光的机器人
20XX年12月31日 至 20XX年1月4日 共 1 周
院 系 电子信息工程系
班 级 10电气3
姓 名 **
学 号 **
第一章 绪论
1.1课程设计任务背景
机器人由机械部分、传感部分、控制部分三大部分组成.这三大部分可分成驱动系统、机械结构系统、感受系统、机器人一环境交互系统、人机交互系统、控制系统六个子系统现在机器人普遍用于工业自动化领域,如汽车制造,医疗领域,如远程协助机器人,微纳米机器人,军事领域,如单兵机器人,拆弹机器人,小型侦查机器人(也属于无人机吧),美国大狗这样的多用途负重机器人,科研勘探领域,如水下勘探机器人,地震废墟等的用于搜查的机器人,煤矿利用的机器人。如今机器人发展的特点可概括为:横向上,应用面越来越宽。由95%的工业应用扩展到更多领域的非工业应用。像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷,还有空间机器人、潜海机器人。机器人应用无限制,只要能想到的,就可以去创造实现; 纵向上,机器人的种类会越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小;机器人智能化得到加强,机器人会更加聪明
1.2课程设计的要求
设计一个机器人系统,该机器人可以是轮式、足式、车型、人型,也可以是仿其他生物的,但该机器人应具备的基本功能为:能够灵活行进,能感知光源、转向光源并跟踪光源;另外还应具备一项其他功能,该功能可自选(如亮灯、按钮启动、红外接近停止等)。
具体要求如下:
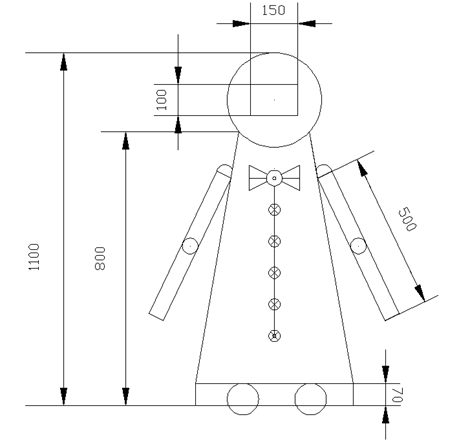
1、 根据功能要求进行机械构型设计,并用实训套件搭建实物。
2、 基于实训套件选定满足功能要求的传感器;
3、 设计追光策略及运动步态;
4、 用NorthStar设计完整的机器人追光程序;
5、 调试;
6、 完成课程设计说明书,内容:方案设计、硬件搭建过程(附照片)、控制算法流程、程序编写、调试结果、心得体会。
…… …… 余下全文