线形定常系统的串联校正
一、实验目的
1. 对系统性能进行分析,选择合适的校正方式,设计校正器模型。
2. 通过仿真实验,理解和验证所加校正装置的结构、特性和对系统性能的影响;
3. 通过模拟实验部分进一步理解和验证设计和仿真结果,进而掌握对系统的实时调试技术。
二、实验数据或曲线
选取实验题目:(3)系统开环传递函数: , 性能要求:在
, 性能要求:在 作用下,
作用下, ,
, ,
, 。
。
1. MATLAB仿真部分
1.1由,可确定k≧20,去k=20.
频域分析:
在Matlab软件中输入程序:g=tf([20],[1 1 0]);bode(g)
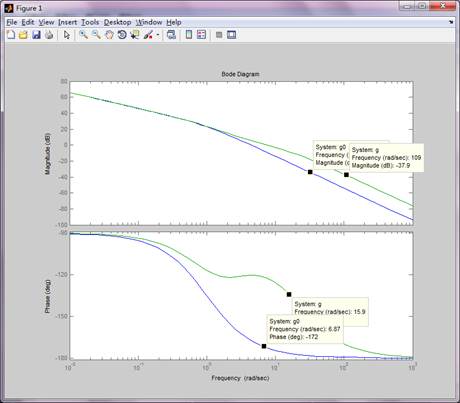
绘制出校正前系统的伯德图如图9-2所示:
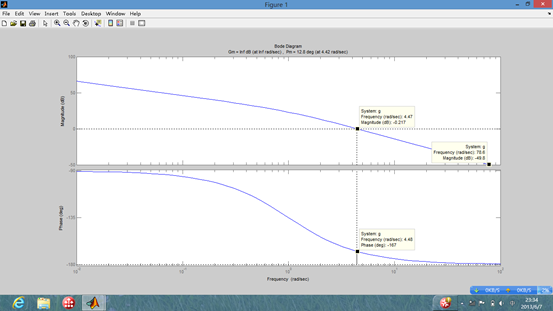
图9-2 校正前系统的伯德图
由图9-2中可知,校正前系统的截止频率为4.47rad/s,相角裕度 =
= ,可知系统的性能不满足性能要求,需要校正。
,可知系统的性能不满足性能要求,需要校正。
时域分析:
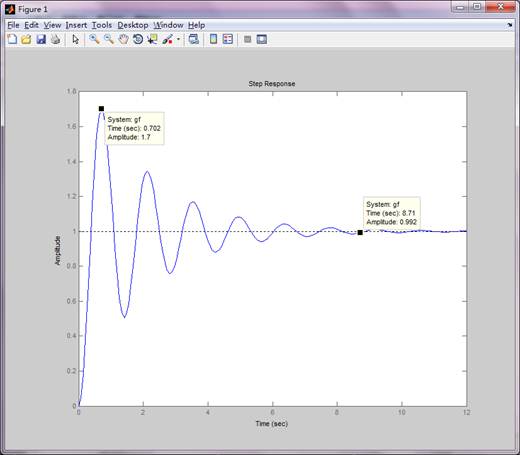
输入程序为:gf=feedback(g,1);step(gf)
校正前闭环系统的阶跃响应曲线如图9-3所示:

图9-3校正前闭环系统的阶跃响应曲线
对应参数:调节时间ts=7.83s,δ%=70.1%
1.2将理论计算出的校正器模型引入,进行校正后的仿真时频域分析
频域分析:在Matlab软件中输入程序:gc=tf([7.52 20],[0.047 1.047 1 0]);g1=g*gc;bode(g,g1)
…… …… 余下全文

 ,试设计一超前校正装置,使校正后系统的静态速度误差系数
,试设计一超前校正装置,使校正后系统的静态速度误差系数 ,相位裕量
,相位裕量 ,增益裕量
,增益裕量 。
。 ,求原系统的相角裕度。
,求原系统的相角裕度。

 北 京 航 空 航 天 大 学
北 京 航 空 航 天 大 学
 处。
处。 ,试确定串联校正装置的特性,使系统满足在斜坡函数作用下系统的稳态误差小于0.1,相角裕度
,试确定串联校正装置的特性,使系统满足在斜坡函数作用下系统的稳态误差小于0.1,相角裕度 。
。
 ,求原系统的相角裕度。
,求原系统的相角裕度。