智能寻迹小车的设计
Intelligent Tracing Car Design
摘要
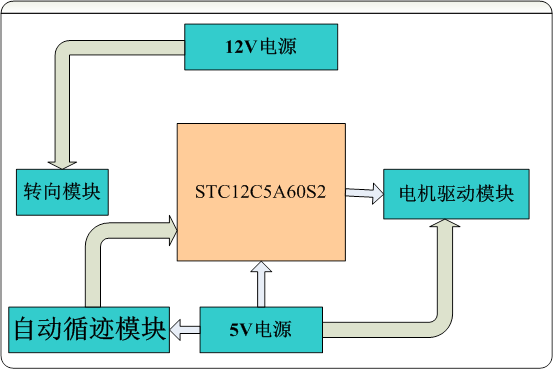
在智能寻迹小车控制系统的设计中,以AT89C51为核心,用L298N驱动两个减速电机,当产生信号驱动小车前进时,是通过寻迹模块里的红外对管是否寻到黑线产生的电平信号通过LM393再返回到单片机,单片机根据程序设计的要求做出相应的判断送给电机驱动模块,让小车来实现前进、左转、右转、停车等基本功能。
寻白线时,外部环境光线的强弱对小车的运动会产生很大的影响,基于此原因,本实验中的寻迹是指在白色地板上寻黑线。
寻迹是指通过红外发射管和接收管识别路径。
本实验的重点有三个方面:1.硬件的设计实现;2.软件的设计实现;3.方案的比较与论证。
报告共分为五章:
第一章是智能小车总体概况。介绍了小车的功能及展示了小车模型。
第二章是系统要求。介绍了小车设计的要求及寻迹的原理。详细阐述了各模块的方案比较与论证,最后得出最终方案。
第三章是硬件实现及单元电路实现。详细阐述了各部分电路的设计,并给出了原理图。
第四章是软件设计。介绍了设计思想、程序流程图及具体程序设计。
…… …… 余下全文