自控实验六:状态反馈与状态观测器
一.实验目的
1. 掌握用状态反馈进行极点配置的方法。
2. 了解带有状态观测器的状态反馈系统。
二.实验原理
1. 闭环系统的动态性能与系统的特征根密切相关,在状态空间的分析中可利用状态反馈来配置系统的闭环极点。这种校正手段能提供更多的校正信息,在形成最优控制率、抑制或消除扰动影响、实现系统解耦等方面获得广泛应用。在改善与提高系统性能时不增加系统零、极点,所以不改变系统阶数,实现方便。
2. 已知线形定常系统的状态方程为 为了实现状态反馈,需要状态变量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量
为了实现状态反馈,需要状态变量的测量值,而在工程中,并不是状态变量都能测量到,而一般只有输出可测,因此希望利用系统的输入输出量构成对系统状态变量的估计。解决的方法是用计算机构成一个与实际系统具有同样动态方程的模拟系统,用模拟系统的状态向量 作为系统状态向量
作为系统状态向量 的估值。状态观测器的状态和原系统的状态之间存在着误差,而引起误差的原因之一是无法使状态观测器的初态等于原系统的初态。引进输出误差
的估值。状态观测器的状态和原系统的状态之间存在着误差,而引起误差的原因之一是无法使状态观测器的初态等于原系统的初态。引进输出误差 的反馈是为了使状态估计误差尽可能快地衰减到零。状态估计的误差方程为
的反馈是为了使状态估计误差尽可能快地衰减到零。状态估计的误差方程为

误差衰减速度,取决于矩阵(A-HC)的特征值。
3. 若系统是可控可观的,则可按极点配置的需要选择反馈增益阵k,然后按观测器的动态要求选择H,H的选择并不影响配置好的闭环传递函数的极点。因此系统的极点配置和观测器的设计可分开进行,这个原理称为分离定理。
三.实验内容
被控对象传递函数为
写成状态方程形式为
式中

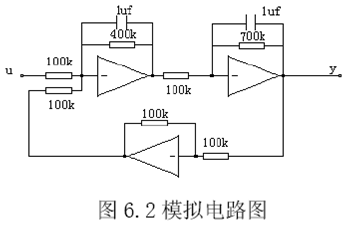
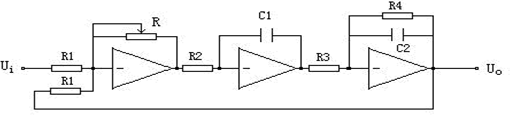
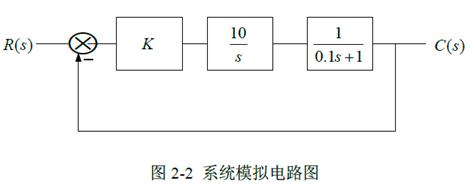
模拟电路图如6.2图所示。
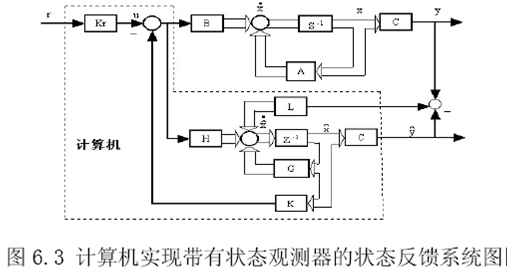
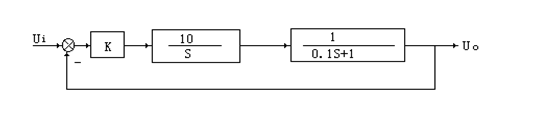
带有状态观测器的状态反馈系统方框图如6.3图所示。
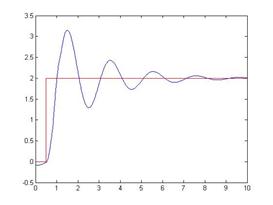
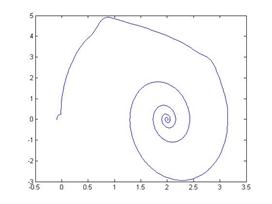
四.实验数据及图像记录
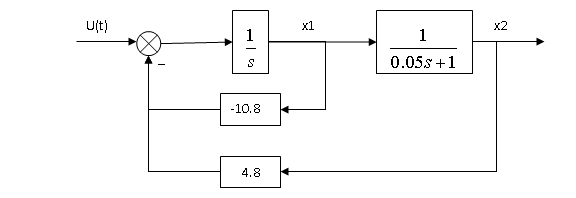
A.图6.1系统状态空间表达式如下:
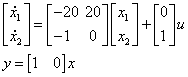
设计状态反馈矩阵为k=[4.8 -10..8]
则加入状态反馈的系统结构图
B.为给定系统配置状态观测器
系统模拟运算电路图如下:
…… …… 余下全文





 ,则
,则 ,
, 
 ,则
,则 ,
, 
 ,则当输出达到稳态时,其输出信号为
,则当输出达到稳态时,其输出信号为 。改变输入信号频率值
。改变输入信号频率值 ,便可测得二组
,便可测得二组 和
和 随
随 (或
(或 )变化的数值,这个变化规律就是系统的幅频特性和相频特性。
)变化的数值,这个变化规律就是系统的幅频特性和相频特性。 及
及 ,然后计算其比值
,然后计算其比值 及
及 ,当
,当 时,有X(0)=0,
时,有X(0)=0, ;即
;即 。显然,仅当
。显然,仅当 时,上式成立。
时,上式成立。