实 验 报 告
课程名称 模糊控制
专业班级 自动化1041
姓 名 赵 伟
学 号 10044211 12
电气与信息学院
和谐 勤奋 求是 创新

…… …… 余下全文
编号:
1. 掌握数字PI及其算法的实现
2. 熟悉在在keil环境下进行单片机程序的设计
3. 熟悉仿真软件protues的使用
1. 计算机系统
2. 编程软件keil4和仿真软件protues7.8
在模拟系统中,PID算法的表达式为

式中
u(t):调节器的输出信号;
e(t):调节器的偏差信号,它等于测量值与给定值之差;
Kp: 调节器的比例系数;
TI: 调节器的积分时间;
TD: 调节器的微分时间;
离散化的PID为:

Δt=T:采样周期,必须使T足够少,才能保证系统有一定的精度;
E(k):第K次采样时的偏差值;
E(k-1) :第K-1次采样时的偏差值;
K:采样序号,K=0,1,2……;
P(k-1):第K次采样时调节器的输出;
上式计算复杂,经过化简为:

式中:
 为积分系数
为积分系数
 为微分系数
为微分系数
要计算第K次输出值u(k),只需要知道u(k-1),e(k),E(k-1),e(k-2)即可。
上式也称为位置型PID的位置控制算法。
在很多控制系统中,由于执行机构是采用布进电机进行控制,所以只要给一个增量信号即可。因此得到增量型PID的位置控制算法。

整个系统的控制框图如下所示:

图1 PID控制系统结构框图
在本次设计中,经过计算,被控对象的传递函数是:
其中:C=10uf,R=20K;带入上式后可得:
…… …… 余下全文
《智能控制技术》
实 验 报 告 书
学院:
专业:
学号:
姓名:
实验一:模糊控制与传统PID控制的性能比较
一、实验目的
通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。
二、实验内容
本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。
通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1)
控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。
设计系统的模糊控制,并与传统的PID控制的性能进行比较。
三、实验原理、方法和手段
1.实验原理:
1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID控制器参数kp、ki、kd;
2)根据模糊控制规则,编写模糊控制器。
2.实验方法和手段:
1)在PID控制仿真中,经过仔细选择,我们取kp=5,ki=0.1,kd=0.001;
2)在模糊控制仿真中,我们取ke=60,ki=0.01,kd=2.5,ku=0.8;
3)模糊控制器的输出为:u= ku×fuzzy(ke×e, kd×e’)-ki×∫edt
其中积分项用于消除控制系统的稳态误差。
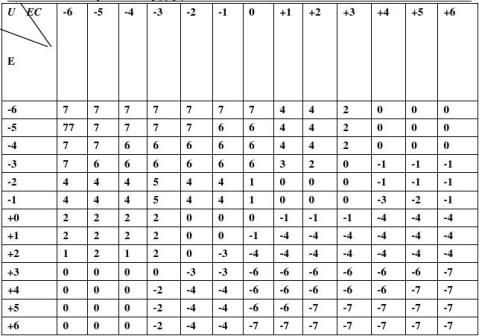
4)模糊控制规则如表1-1所示:
在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=td/T),umin用于表示控制的死区电平,umax用于表示饱和电平。当Nd=0时,表示系统不存在纯延迟。
…… …… 余下全文
在线推理式模糊逻辑控制器设计实验报告
学 院: 电 力 学 院
专 业: 自 动 化
学 号:
姓 名:
时 间:20##年11月16日
一、实验目的
利用Matlab软件实现模糊控制系统仿真实验,了解模糊控制的在线推理方法的基本原理及实现过程。
二、实验要求
以matlab模糊工具箱中提供的一个水位模糊控制系统仿真的实例,定义语言变量的语言值,设置隶属度函数,根据提供的规则建立模糊逻辑控制器。最后启动仿真,观察水位变化曲线。
三、实验步骤
叙述在线推理模糊控制的仿真的主要步骤。
1)在matlab命令窗口输入:sltank,打开水位控制系统的simulink仿真模型 图,如图;

2)在matlab的命令窗口中,输入指令: fuzzy,便打开了模糊推理系统编辑器(FIS Editor),如图;

4)①利用FIS Editor编辑器的Edit/membership function菜单,打开隶属度函数编辑器,如下图,将输入语言变量level的取值范围(range)和显示范围(display range)设置为[-1,1],隶属度函数类型(type)设置为高斯型函数(gaussmf),而所包含的三条曲线的名称(name)和参数(parameters)([宽度 中心点])分别设置为:high,[0.3 -1];okay [0.3 0];low [0.3 1]。其中high 、okay、 low分别代表水位高、正好、低;
…… …… 余下全文
实验一熟悉模糊工具箱
一、 目的和要求
1. 目的
(1) 通过本次实验,进一步了解模糊控制的基本原理、模糊模型的建立和模糊控制器的设计过程。
(2) 掌握MATLAB模糊逻辑工具箱的图形用户界面设计模糊控制器的过程。
2. 要求
(1)充分理解实验内容,并独立完成实验报告。
(2)实验报告要求:实验题目、实验具体内容、结果分析、收获或不足。
二、 实验内容
1、 利用matlab中的模糊逻辑工具箱提供的图形用户界面(GUI)工具设计一个两输入、一输出的模糊控制器,控制器的要求如下:
(1)设模糊控制器的输入变量为:误差E和误差变化EC,输出量为U。
(2)隶属度函数:
u 隶属度函数均为三角函数
u E、EC和U的模糊语言变量集均为{NB,NM,NS,ZO,PS,PM,PB}
u E和EC论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
u U的论域为{-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
(3)控制规则表如下:
表1 模糊控制表

三.实验步骤
模糊逻辑工具箱提供的图形用户界面(GUI)工具有五个:模糊推理系统(FIS)编辑器;隶属函数编辑器;模糊规则编辑器;模糊规则观察器;输出曲面观察器。
1. 模糊控制器结构设计
FIS处理系统有多少个输入变量,输出变量,名称是什么,模糊算子“与”(min,prod乘积,custom自定义),“或”(max大,probor 概率统计方法,custom),推理方法(min,prod,custom),聚类方法(max,probor,sum,custom),解模糊的方法(centroid质心法,bisector中位线法,middle of maximum,largest of maximum,smallest of maximum)。Matlab的FIS界面如图3所示。
…… …… 余下全文
实验二
一、实验目的
1.通过实验熟悉并掌握GUI(Graph User Interface)的工具箱函数的使用方法
2.通过实验熟悉并掌握模糊控制器的设计方法与步骤
3.通过实验熟悉并掌握利用GUI建立FIS的方法与步骤
2.通过实验进一步熟悉并掌握Matlab软件的使用方法
二、实验内容
1.根据给定要求,设计炉温控制系统的模糊控制器
2.编制炉温模糊控制系统的Matlab仿真程序
3.利用GUI建立FIS
三、实验步骤
1.设计炉温控制系统的模糊控制器
①确定模糊控制器的结构
②定义输入、输出模糊集
③定义输入输出隶属函数
④建立模糊控制规则
⑤建立模糊控制表
⑥进行模糊推理,求出模糊关系作出模糊决策
⑦对控制量进行反模糊化
2.按上述步骤,设计炉温模糊控制系统的Matlab仿真程序
3.针对本例,进一步利用GUI建立FIS
①进入FIS编辑器
②建立初步的模糊推理系统
③建立各变量的隶属函数
④设置当前变量的变化范围和其在隶属函数上的显示范围
⑤打开模糊规则编辑器加入模糊控制规则
⑥打开模糊规则观察器,观察模糊规则
⑦打开输出曲面观察器,观察模糊推理系统的输出曲面
⑧分析实验结果,完成实验报告。
四、实验要求
对于所设计的炉温控制系统,要求温度保持在600°C恒定,针对该控制系统有以下控制经验:
1.若炉温低于600°C,则升压;低得越多升压越高.
2.若炉温高于600°C,则降压;高得越多降压越低.
3.若炉温等于600°C,则保持电压不变.
(1)设模糊控制器为一维控制器,输入输出变量的量化等级为7级,取5个模糊集。
(2)设模糊控制器为一维控制器,输入输出变量的量化等级为7级,取7个模糊集。
…… …… 余下全文
华北水利水电大学
实验报告

学生姓名 号:
课程名称: 指导教师:
2 0 13年 11月
查询表式模糊逻辑控制器设计实验报告
一、 实验目的
利用Matlab软件实现模糊控制系统仿真实验,了解模糊控制的查询表方法的基本原理及实现过程,并找出参数Ke,Kec,和Ku对模糊控制器性能影响的规律。
二、 实验要求
1
设计一个二维模糊控制器分别控制一一个一阶被控对象G1(s)?。先用
T1s?1
模糊控制器进行控制,然后改变控制对象参数的大小,观察模糊控制的鲁棒性,找出参数Ke,Kec,和Ku对模糊控制器性能影响的规律。 三、 实验步骤
叙述查询表式模糊控制系统仿真主要步骤。
按照试验报告书中的步骤先:找元件→连线→修改参数→仿真 ;在修改元件的时候在进行仿真时将下述表格中元素以矩阵形式输入到matlab直接查询表
(一)查询表式模糊控制系统仿真实验
(所有的采样时间为10S,稳态误差按第九秒计算)
1
1、一阶对象G1(s)?采用查询表式方法进行仿真实验,自己选定Ke,
T1s?1
Ku,Kec的值,按下表中给出的数值调整被控对象参数并观察输出响应曲线,观察模糊控制器对被控对象参数变化的适应性。(其中T1称为被控对象参数,Ke,Ku,Kec称为控制器参数)
控制参数:Ke = 100 Ku= -1 Kec= 1
(以误差1%决定调节时间)
2变其中的一个控制参数通过仿真实验观察它们各自对控制性能的影响。将实
验结果填入下表。
(1)Ke =200 Ku

= -1


(二)实验讨论
1、通过对模糊控制器参数的设置及调整所获得的控制性能,得出关于控制
器参数对其性能影响的基本规律。
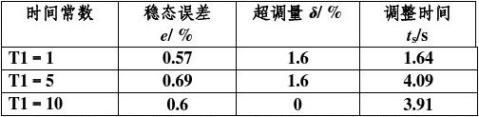
对于一阶对象:
Kec对超调量,稳态误差,调节时间无影响;
Ku(绝对值)变大,超调量不变,稳态误差变大,调节时间变长; Ke变大,稳态误差及超调量不变,调节时间变短。
…… …… 余下全文
