四川大学
课程实验报告
一、实验目的
系统仿真是运用仿真软件(如simio)创造模型来构建或模拟现实世界的虚拟实验室,它能过帮助你探寻你所关注的系统在给定的条件下的行为或状态,它还能帮助你在几乎没有风险的情况下观察各种改进和备选方案的效果。尤其是对一些难以建立物理模型和数学模型的复杂的随机问题,可通过仿真模型来顺利地解决预测、分析和评价等系统问题。
通过本次simio系统仿真综合实验,掌握并能熟练使用系统仿真软件simio,利用simio建立模型,能体验其3D动画效果,并根据需求设定系统参数,如server的processing time、Initial Capacity,source的interarrival time参数等。运行并分析系统各个资源的利用率、排队队长及服务等待时间,能发现系统存在的问题,比较各个排队系统的系统资源利用率、排队队长和服务等待时间,评价排队系统的优劣。
二、实验地点及环境
四川大学工商管理学院的学院大楼综合实验室,运用PC机及simio系统仿真软件,在老师的指导下完成此次系统仿真实验。
三、实验步骤
㈠、建立模型
1. ModelⅠ
首先加入一个source、三个server、一个sink、一个ModeEntity,并用path连接。将source更名为arrive,sink更名为depart,ModelEntity更名为customer。设置运行时间8小时。
顾客的到达为Poisson流,到达间隔时间为均值为15秒钟的指数分布,故arrive设置interarrival time 参数值为Random.Exponential(15),并选择units为seconds;服务(售票)时间服从指数分布,平均时间为45秒钟,故3个server都设置为interarrival time 参数值为Random.Exponential(45),并选择units为seconds。
…… …… 余下全文
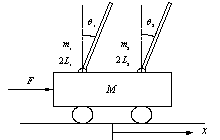 为了简化系统分析,在模型的建立过程中,忽略空气流动阻力以及各种次要的摩擦力。这样,可将双摆系统抽象成小车和两个匀质刚性杆组成的系统,如图2-1所示。
为了简化系统分析,在模型的建立过程中,忽略空气流动阻力以及各种次要的摩擦力。这样,可将双摆系统抽象成小车和两个匀质刚性杆组成的系统,如图2-1所示。
 ,
, ,
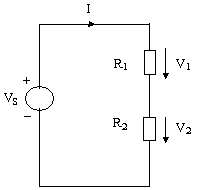
, 。试求恒压源的电流
。试求恒压源的电流 和电压
和电压 、
、 。
。
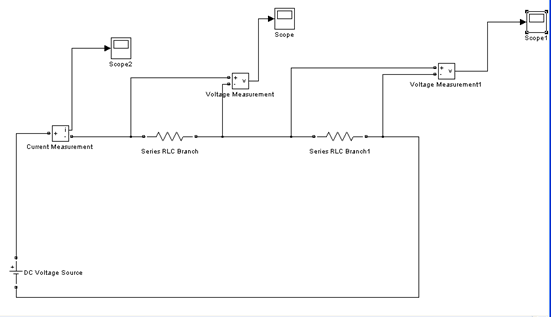
 ,写出程序源代码,输出计算结果:
,写出程序源代码,输出计算结果:
