《港口系统仿真》
课程实验报告
实 验 报 告 题 目: 系统仿真实验
学 院 名 称:
专 业:
班 级:
…… …… 余下全文
《控制系统仿真》
(实验/学习总结)报告
题目:XXXXXXXXXXXX
院 系: 电子信息与控制工程系
专 业: 测控技术与仪器专业
授课教师: 陈政强,石玉秋
本 科 生: X X X
班 级: 测控081,082
学 号:
完成时间: 2010.X.X
1. 实验内容
2. 系统数学模型的建立(实验四可选)
(2.1双摆系统数学模型的推导
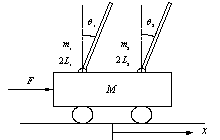 为了简化系统分析,在模型的建立过程中,忽略空气流动阻力以及各种次要的摩擦力。这样,可将双摆系统抽象成小车和两个匀质刚性杆组成的系统,如图2-1所示。
为了简化系统分析,在模型的建立过程中,忽略空气流动阻力以及各种次要的摩擦力。这样,可将双摆系统抽象成小车和两个匀质刚性杆组成的系统,如图2-1所示。
图2-1 简化后的双摆系统
本系统内部各相关参数定义如下:
M ——小车的质量
…… …… 余下全文
系统工程仿真实验报告
实验一:基于VENSIM的系统动力学仿真
一、实验目的
VENSIM是一个建模工具,可以建立动态系统的概念化的,文档化的仿真、分析和优化模型。PLE(个人学习版)是VENSIM的缩减版,主要用来简单化学习动态系统,提供了一种简单富有弹性的方法从常规的循环或储存过程和流程图建立模型。本实验就是运用VENSIM进行系统动力学仿真,进一步加深对系统动力学仿真的理解。
二、实验软件
VENSIM PLE
三、原理
1、在VENSIM中建立系统动力学流图;
2、写出相应的DYNAMO方程;
3、仿真出系统中水准变量随时间的响应趋势;
四、实验内容及要求
某城市国营和集体服务网点的规模可用SD来研究。现给出描述该问题的DYNAMO方程及其变量说明。
L S·K=S·J+DT*NS·JK
N S=90
R NS·KL=SD·K*P·K/(LENGTH-TIME·K)
A SD·K=SE-SP·K
C SE=2
A SP·K=SR·K/P·K
A SR·K=SX+S·K
C SX=60
L P·K=P·J+DT*NP·JK
N P=100
R NP·KL=I*P·K
C I=0.02
其中:LENGTH为仿真终止时间、TIME为当前仿真时刻,均为仿真控制变量;S为个体服务网点数(个)、NS为年新增个体服务网点数(个/年)、SD为实际千人均服务网点与期望差(个/千人)、SE为期望的千人均网点数、SP为的千人均网点数(个/千人)、SX为非个体服务网点数(个)、SR为该城市实际拥有的服务网点数(个)、P为城市人口数(千人)、NP为年新增人口数(千人/年)、I为人口的年自然增长率。
…… …… 余下全文
大学物理仿真实验报告
实验名称:牛顿环法测曲率半径 共 6 页
系 别:_理学院_ 实 验 日 期2010年5月23日
专业班级:***** 组别____ 实 验 报 告 日 期2010年5月23日
姓 名:***** 学号******* 报告退发 ( 订正 、 重做 )
教 师 审 批 签 字
一 实验目的
1.学会用牛顿环测定透镜曲率半径。
2.正确使用读书显微镜,学习用逐差法处理数据。
二 实验仪器
牛顿环装置,读数显微镜,钠光灯。
三 实验原理
…… …… 余下全文
计算机仿真 实验一
姓名:杨中欣 学号:20111336022 班级:11自动化1班
一、 实验目的
1. 学习SIMULINK的实验环境使用。
2. 掌握SIMULINK 进行结构图仿真的方法。
二、 实验内容
1.控制系统结构图仿真
给定被控对象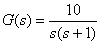 ,控制器
,控制器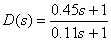 ,按以下两种情况设计SIMULINK仿真结构图(给定信号是单位阶跃信号)。
,按以下两种情况设计SIMULINK仿真结构图(给定信号是单位阶跃信号)。
(1) 无控制器时被控对象单位负反馈。
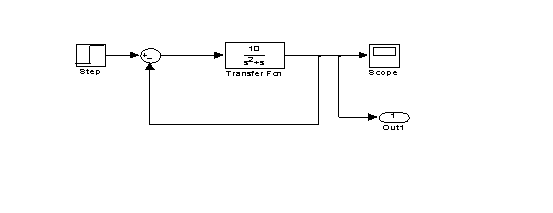
Simulink 图

仿真效果图
(2) 控制器与被控对象串连接成单位负反馈。

Simulink 图

仿真效果图
2.动态系统微分方程仿真
在SIMULINK中求解下列二阶微分方程代表的动态系统在阶跃信号作用下的状态响应。
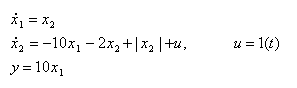
给定的仿真参数:
(1) 信号源参数设置:阶跃信号(Step)的Step time 设为0秒。
(2) 仿真参数设置:仿真时间 0~8秒,求解器选变步长(Variable-step)的ode45,最大仿真步长(Max step size)设为0.01秒。
结构图:
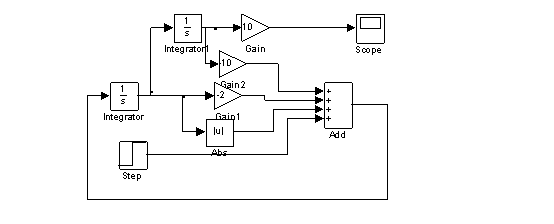
Simulink 图

仿真效果图
3.子系统操作
对实验2中生成的仿真模块,选择其中一部分生成子系统.
(1)对生成的子系统进行命名;

Simulink 图
(2)对生成的子系统进行封装;
首先选定对象,执行封装子系统命令Edit--Mask Subsystem可得封装子系统编辑器对话框.可通过在该对话框定义新模块的标题,参数域,初始化命令,图标和帮助文本来创建一个封装会新模块的对话框和图标.
…… …… 余下全文
仿真软件实验
实验名称:基于电渗流的微通道门进样的数值模拟
实验日期:2013.9.4
一、实验目的
1、对建模及仿真技术初步了解
2、学习并掌握Comsol Multiphysics的使用方法
3、了解电渗进样原理并进行数值模拟
4、运用Comsol Multiphysics建立多场耦合模型,加深对多耦合场的认识
二、实验设备
实验室计算机,Comsol Multiphysics 3.5a软件。
三、实验步骤
1、建立多物理场操作平台
打开软件,模型导航窗口,“新增”菜单栏,点击“多物理场”,依次新增:
“微机电系统模块/微流/斯 托 克 斯 流(mmglf)”
“ACDC模块/静态,电/传导介质DC(emdc)”
“微 机 电 系 统 模 块/微流/电动流(chekf)”
2、建立求解域
工作界面绘制矩形,参数设置:宽度6e-5,高度3e-6,中心(0,0)。复制该矩形,旋转90°。两矩形取联集,消除内部边界。5和9两端点取圆角,半径1e-6。求解域建立完毕。
3、网格划分
菜单栏,网格,自由网格参数,通常网格尺寸,最大单元尺寸:4e-7。
4、设置求解域参数
求解域模式中,斯托克斯流和传导介质物理场下参数无需改动,电动流物理场下,D各向同性,扩散系数1e-8,迁移率2e-11,x速度u,y速度v,势能V。
5、设置边界条件
mmglf—入口1和7边界“进口/层流流进/0.00005”
出口5和12边界“出口/压力,粘滞应力/0”;
…… …… 余下全文
四川大学
课程实验报告
一、实验目的
系统仿真是运用仿真软件(如simio)创造模型来构建或模拟现实世界的虚拟实验室,它能过帮助你探寻你所关注的系统在给定的条件下的行为或状态,它还能帮助你在几乎没有风险的情况下观察各种改进和备选方案的效果。尤其是对一些难以建立物理模型和数学模型的复杂的随机问题,可通过仿真模型来顺利地解决预测、分析和评价等系统问题。
通过本次simio系统仿真综合实验,掌握并能熟练使用系统仿真软件simio,利用simio建立模型,能体验其3D动画效果,并根据需求设定系统参数,如server的processing time、Initial Capacity,source的interarrival time参数等。运行并分析系统各个资源的利用率、排队队长及服务等待时间,能发现系统存在的问题,比较各个排队系统的系统资源利用率、排队队长和服务等待时间,评价排队系统的优劣。
二、实验地点及环境
四川大学工商管理学院的学院大楼综合实验室,运用PC机及simio系统仿真软件,在老师的指导下完成此次系统仿真实验。
三、实验步骤
㈠、建立模型
1. ModelⅠ
首先加入一个source、三个server、一个sink、一个ModeEntity,并用path连接。将source更名为arrive,sink更名为depart,ModelEntity更名为customer。设置运行时间8小时。
顾客的到达为Poisson流,到达间隔时间为均值为15秒钟的指数分布,故arrive设置interarrival time 参数值为Random.Exponential(15),并选择units为seconds;服务(售票)时间服从指数分布,平均时间为45秒钟,故3个server都设置为interarrival time 参数值为Random.Exponential(45),并选择units为seconds。
…… …… 余下全文
模电仿真实验报告
姓名: 学号:
实验一 晶体三极管共射放大电路
一、 实验目的
1、学习共射放大电路的参数选取方法。
2、学习放大电路静态工作点的测量与调整,了解静态工作点对放大电路性能的影响。
3、学习放大电路的电压放大倍数和最大不失真输出电压的分析方法。
4、学习放大电路输入、输出电阻的测量方法以及频率特性的分析方法。
二、 实验准备
已知条件和设计要求如下:
1、电源电压 =12V;
2、静态工作电流 =1.5mA;
3、当 =3KΩ,
=3KΩ,  =∞时,要求
=∞时,要求 >=3V(峰值),
>=3V(峰值), >=100;
>=100;
4、根据要求选取三极管,β=100~200, = =10μF, =100μF;
三、实验内容
1、三极管在BIPOLAR库中,元件名称:Q2N2222
参数设置方法:激活三极管,右键打开Edit\pspice model文本框,修改电流放大系数Bf=100(默认值为255.9),修改 =0.7V(默认值为0.75 V),修改基区电阻 =300(默认值为10)。修改完成后,存盘退出。
电容参数为 = =10μF, =100μF;
电阻参数 =3K,其他阻值根据参数计算得出。
2、根据计算及 =1.5mA得实验电路如下:
直流通路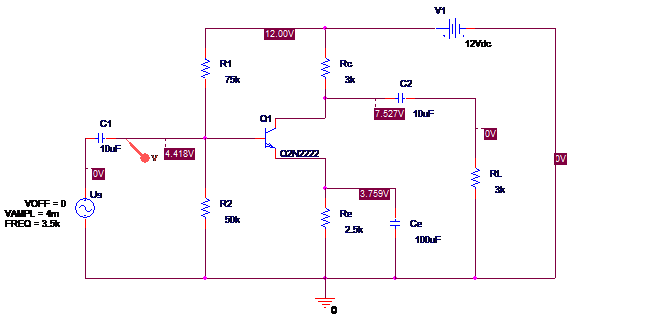
3、共射放大电路的静态分析
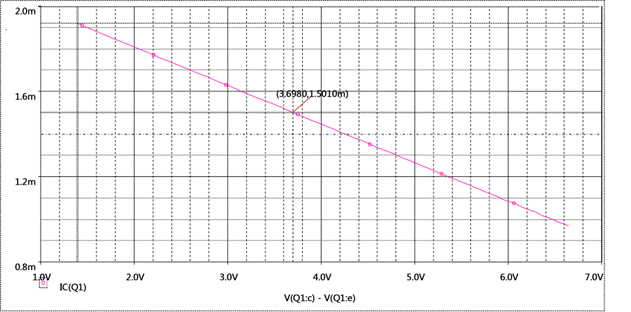
由各节点电压和各支路电流可知,电路基本符合实验设计要求。电路工作在放大区。
4、电路输入与输出波形
输入端加交流信号源 vsin(交流信号频率:3.5KHz,幅值:10mv)。
交流通路
当=3KΩ,交流扫描分析如下:
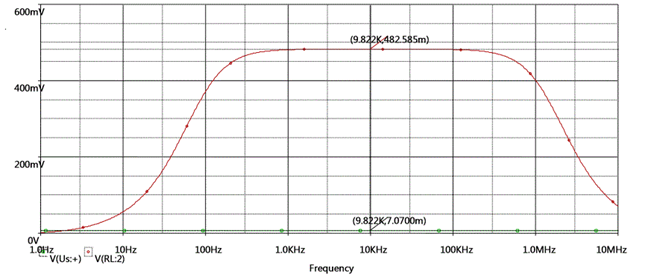
对比输入和输出电压容易知道,共射放大电路接3千欧负载时电压放大倍数少于100,不满足要求。
1)当开路时,交流扫描分析如下:
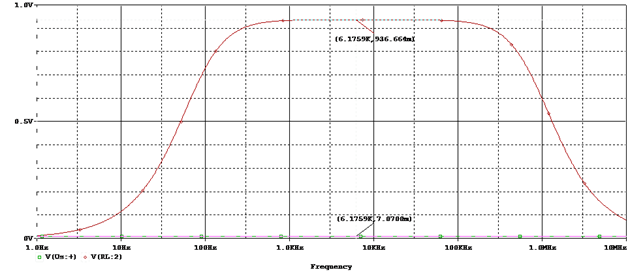
对比输入和输出电压容易知道,共射放大电路负载开路时电压放大倍数大于100,满足要求。
3)当=3KΩ时,瞬态分析,放大电路输入、输出电压波形。
…… …… 余下全文
